6-Axis Articulated Robot
Transformation of an articulated arm robot with six rotary axes and six degrees of freedom (DoF). The three orientation axes of the robot arm intersect at one point: the joint center.
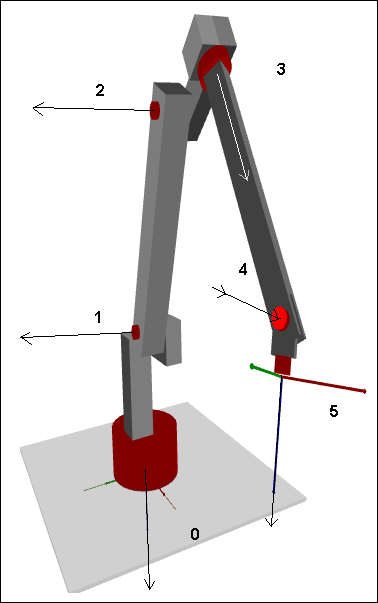
The SMC_Trafo_ArticulatedRobot_6DOF and SMC_TrafoF_ArticulatedRobot_6DOF function blocks implement forward and inverse transformations of an articulated arm robot with six rotational axes. In the image, the Cartesian coordinate system is marked below at axis 0. The z-axis points downwards and the x-axis points forwards in the direction of the tool center point (TCP). The origin of the Cartesian coordinate system is the intersection axis 0 and the underside of the robot.
Definition of axes
The rotary axes are identified by black arrows. The positive direction of rotation is given by the right-hand rule. For example, when axis 0 is turned in positive direction, the robot rotates clockwise when viewed from above.
Axes 0, 1, 3, and 4: ]-180°, 180°[
Axis 2: [-90°, 180°]
Axis 5: Unrestricted; the range may be greater than 360°.
Homing position and dimensions
The image on the left shows the homing position of the kinematics, which is the position where all axes are in their zero position. Specify the indicated dimensions in the configuration structure SMC_TrafoConfig_ArticulatedRobot_6DOF. The names and signs of the parameters are in accordance with the Denavit–Hartenberg convention. The image on the right shows the additional Denavit–Hartenberg parameter d3.
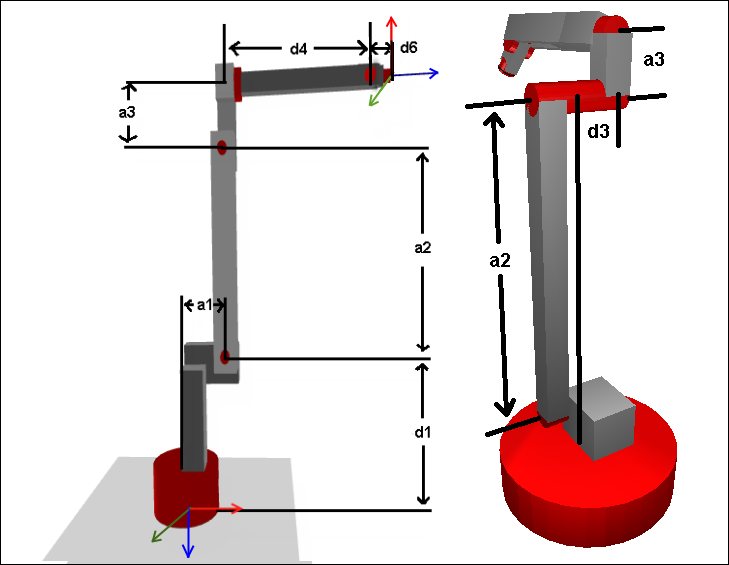
a1, a3, d4, and d6 have to be >= 0
a2 has to be > 0 (>
g_fSMC_CNC_EPS)d1 has to be <= 0
Joint Offset (sigma_i) | Lever Offset (d_i) | Lever Length (a_i) | Lever Rotation (alpha_i) | |
|---|---|---|---|---|
1 | 0° | d1 | a_1 | -90° |
2 | 90° | 0 | a_2 | 0° |
3 | 0° | d3 | a_3 | 90° |
4 | 0° | d4 | 0 | 90° |
5 | 0° | 0 | 0 | -90° |
6 | 0° | d6 | 0 | 0° |
Programming
The position of the tool center is controlled with X, Y, and Z. The units of X, Y, and Z are the same as used for the parameters a_i and d_i (for example: mm). The orientation is controlled in degrees with A (yaw), B (pitch), and C (roll).
Transformation objects
The data structure SMC_TrafoConfig_ArticulatedRobot_6DOF and the SMC_Trafo_ArticulatedRobot_6DOF and SMC_TrafoF_ArticulatedRobot_6DOF function blocks are linked to SM3_CNC.