Application Example of Synchronization

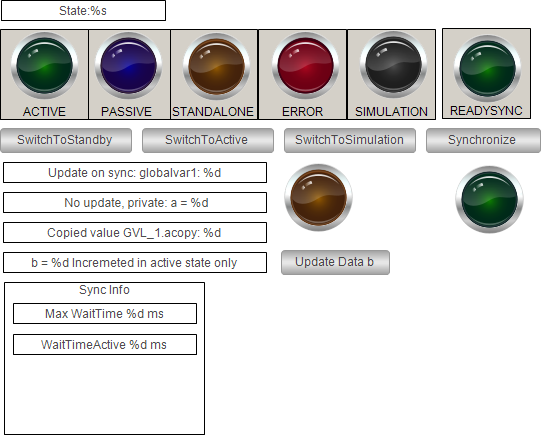
In this sample application, the application controls the synchronization of data in the redundancy system. The example shows how the synchronization phases can be triggered by means of the library POUs and how the state data of the redundancy system can be evaluated. A visualization displays these states and provides redundancy commands. The visualization is an interface for a user.
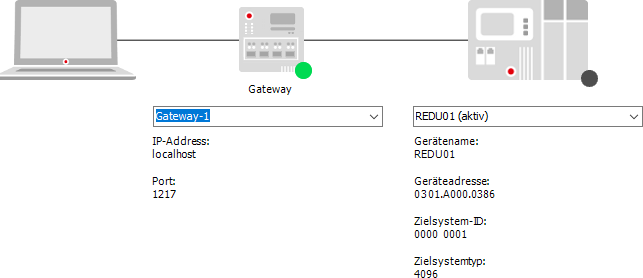
The redundancy system consists of the two REDU01 and REDU01 CODESYS Control Win PLCs. The visualization runs on a CODESYS TargetVisu.
Configuration
Object in Device Tree | Settings |
|---|---|
Top-level |
 |
Task Configuration |  |
Redundancy Configuration | |
PLC 2 |
|
General | 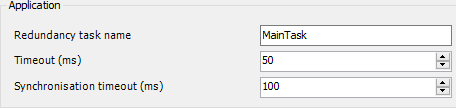 |
Redundancy Link | 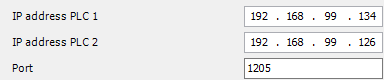 |
Visualization |  |
In Registered Areas |  |
Global data
GVL
(* Variables synchronized at Redundancy synchronization. Synchronization happens
- on bootup of the second PLC
- on call to RedundancySynchronizeData
- in every task cycle if setting is active in cfg file of both PLCs:
[CmpRedundancy]
DataSyncAlways=1
*)
VAR_GLOBAL
globalvar1: INT;
arr1 : ARRAY [0..10000] OF DWORD;
arr2 : ARRAY [0..10000] OF DWORD;
arr3 : ARRAY [0..10000] OF DWORD;
arr4 : ARRAY [0..10000] OF DWORD;
bSyncDataResult: BOOL;
END_VARGVL_1
VAR_GLOBAL
sReduState: RedundancyState;
conni: REDUNDANCY_CONNECTION_INFO;
sSyncInfo: SYNC_INFO;
sPlcIdent: PLC_IDENT;
bConnectionState: BOOL;
tLast: TIME;
nTimeWarp: INT;
tDiff: TIME;
nTimeRun: INT;
tNow: TIME;
sState: STRING;
acopy: INT;
MB2 AT %MX0.2: BOOL;
tDiffMax: TIME;
tNow2: TIME;
tDiff2: TIME;
nTimeWarp2: INT;
tDiffMax2: TIME;
tLast2: TIME;
tNowDownloadDone: TIME;
tNowCodeInitDone: TIME;
nCycle: INT;
atNow: ARRAY [0..9] OF TIME;
nCycle2: INT;
atNow2: ARRAY [0..9] OF TIME;
bAreaRegisterDone: BOOL;
pIB64: POINTER TO BYTE;
bUpdateData: BOOL;
bSwitchToStandby: BOOL;
bSwitchToActive: BOOL;
bSwitchToSimulation: BOOL;
bSynchronize: BOOL;
bSwitchToStandaloneResult: BOOL;
END_VARGVL_Synchro
(* Global variables, registered to be synchronized in every task cycle. *)
VAR_GLOBAL
iSyncFirst: INT;
iSyncCount: INT;
iSyncLast: INT;
END_VARPOUs for controlling the synchronization
PROGRAM PLC_PRG
VAR
a: INT;
bSyncCalled: BOOL;
Timestamp1: systime.SYSTIME;
firstcycle: BOOL := TRUE;
Timestamp2: systime.SYSTIME;
b: INT;
sText: STRING;
bCopy: BOOL;
Blink: TON;
bBlink: BOOL;
bAutoSync: BOOL := TRUE; // Flag to enable autosync mechanism
xResSync: BOOL;
END_VARIF a = 0 THEN
Blink(PT := T#1S, IN := TRUE);
END_IF
a := a + 6;
globalvar1 := globalvar1 + 1;
(* Call functions of redundancy library *)
GetRedundancyState(ADR(sReduState));
bConnectionState := GetConnectionState();
sPlcIdent := GetPlcIdent();
(* Call functions of redundancy connection library *)
GetConnectionInfo(ADR(conni));
GetSyncInformation(ADR(sSyncInfo));
// Flag to enable autosync mechanism
IF bAutoSync THEN
IF sReduState.eRedundancyState = RDCY.STATE.RS_CYCLE_STANDALONE AND bConnectionState AND xResSync = FALSE AND sPlcIdent = RDCY.PLC_IDENT.PLC_ID_2 THEN
// Call of Synchronize from redundant application. Note, actual synchronisation is executed from background loop with some delay
xResSync := RDCY.Synchronize();
END_IF
END_IF
// Recover from error state
(*IF sReduState.eRedundancyState = RDCY.STATE.RS_SYNCHRO_ERROR THEN
bSwitchToStandaloneResult := SwitchToStandalone();
END_IF
IF sReduState.eRedundancyState = RDCY.STATE.RS_CYCLE_ACTIVE THEN
bSyncDataResult := RedundancySynchronizeData();
END_IF
*)
IF bUpdateData THEN
bUpdateData := FALSE;
RedundancySynchronizeData();
END_IF
IF bSwitchToStandby THEN
bSwitchToStandby := FALSE;
SwitchToStandby();
END_IF
IF bSwitchToActive THEN
bSwitchToActive := FALSE;
SwitchToActive();
END_IF
IF bSwitchToSimulation THEN
bSwitchToSimulation := FALSE;
SwitchToSimulation();
END_IF
IF bSynchronize THEN
bSynchronize := FALSE;
Synchronize();
END_IF
Blink();
IF Blink.Q THEN
Blink.IN := FALSE;
Blink();
Blink.IN := TRUE;
bBlink := NOT bBlink;
END_IF
%IB64;
IF bCopy THEN
bCopy := FALSE;
acopy := a;
END_IF
arr2 := arr1;
IF sReduState.eRedundancyState = RDCY.STATE.RS_CYCLE_ACTIVE THEN
sState := 'Active';
b := b + 1;
pIB64 := ADR(%IB64);
pIB64^ := pIB64^ + 1;
ELSIF sReduState.eRedundancyState = RDCY.STATE.RS_CYCLE_STANDBY THEN
sState := 'Passive';
ELSIF sReduState.eRedundancyState = RDCY.STATE.RS_CYCLE_STANDALONE THEN
sState := 'Standalone';
ELSIF sReduState.eRedundancyState = RDCY.STATE.RS_SIMULATION THEN
sState := 'Simulation';
ELSIF sReduState.eRedundancyState = RDCY.STATE.RS_SYNCHRO THEN
sState := 'Synchro';
ELSIF sReduState.eRedundancyState = RDCY.STATE.RS_SYNCHRO_ERROR THEN
sState := 'SYNCHRO_ERROR';
ELSIF sReduState.eRedundancyState = RDCY.STATE.RS_NO_LICENSE THEN
sState := 'LICENCE EXPIRED';
ELSIF sReduState.eRedundancyState = RDCY.STATE.RS_START THEN
sState := 'START';
ELSE
sState := 'Other';
END_IF
nCycle := nCycle + 1;PROGRAM POU
VAR
END_VAR
tNow2 := TIME();
tDiff2 := tNow - tLast;
IF tDiff2 > T#1D THEN
nTimeWarp2 := nTimeWarp2 + 1;
LogAdd(STD_LOGGER, 'IEC', 0, 0, 0, 'Time Warp');
END_IF
IF tDiff2 > tDiffMax2 THEN
tDiffMax2 := tDiff2;
END_IF
tLast2 := TIME();
IF nCycle2 < 10 THEN
atNow2[nCycle2] := tNow2;
END_IF
nCycle2 := nCycle2 + 1;FUNCTION cdCodeInit : DWORD
VAR_IN_OUT
EventPrm: CmpApp.EVTPARAM_CmpApp;
END_VAR
VAR
END_VAR
tNowCodeInitDone := TIME();FUNCTION cbDownloadDone : DWORD
VAR_IN_OUT
EventPrm: CmpApp.EVTPARAM_CmpApp;
END_VAR
VAR
END_VAR
(* Register GVL_Synchro to be synchronized in every task cycle *)
bAreaRegisterDone := AreaRegister(ADR(iSyncFirst), ADR(iSyncLast) - ADR(iSyncFirst) + sizeof(iSyncLast), AREA_TYPE.AREA_SYNCHRO);
tNowDownloadDone := TIME();Visualization