4-Achs-Palletierer-Kinematik
Die 4-Achs-Palletierer-Kinematik ist ein allgemeiner Robotertyp, der oftmals für Palletieraufgaben verwendet wird. Die Kinematik verfügt über 4 gesteuerte Rotationsachsen (in rot eingezeichnet) und über eine 5. mechanische Rotationsachse (in grau eingezeichnet). Die Bausteine SMC_Trafo_4AxisPalletizer und SMC_TrafoF_4AxisPalletizer implementieren dessen Rückwärts- und Vorwärtstransformation.
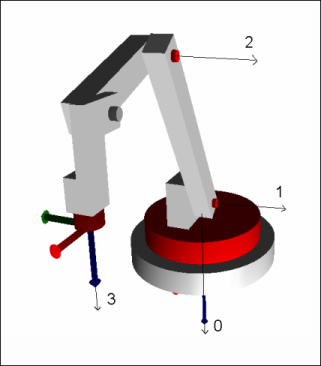
Das unter der Basis des Palletierers gezeichnete Koordinatensystem ist das Weltkoordinatensystem. Die z-Achse geht senkrecht nach unten, die x-Achse nach „vorne“, das heißt in die Richtung, in die der Arm in der Nullstellung der Achsen zeigt. Der Ursprung des Weltkoordinatensystems ist der Schnittpunkt zwischen der Gelenkachse 1 und der Unterseite des Roboters.
Definition der Achsen
Die folgende Abbildung zeigt die Drehrichtung der 4 Achsen. Die schwarzen Pfeile laufen entlang der Gelenkachse. Die Drehrichtung ist gemäß der Rechten-Hand-Regel festgelegt: Zeigt der Daumen der rechten Hand entlang dem Pfeil, dann ist die positive Drehrichtung in Richtung der leicht gekrümmten Finger der Hand. Zum Beispiel ist von oben gesehen die positive Drehrichtung der Achse 0 im Uhrzeigersinn, Achse 1 und 2 kippen bei positiver Drehung „nach vorne“.
Die Kinematik verfügt über 4 gesteuerte Rotationsachsen (siehe rot eingefärbte Achsen a0, a1, a2, a3) und über eine 5. mechanische Rotationsachse (siehe grau eingefärbte Achse M).
Achse 0: ]-180°, 180°[
Achse 1: [-90°, 90°]
Achse 2: [-180°, 90[
Achse M: Mechanische Rotationsachse. Keine Beschränkung
Achse 3: nicht beschränkt, Bereich kann auch größer 360° sein
Nullstellung und Maße
Die Abbildung zeigt die Kinematik in der Nullstellung aller Achsen. In der Nullstellung verlaufen die Achsen des Werkzeugkoordinatensystems parallel zu denen des Maschinenkoordinatensystems. Tragen Sie die eingezeichneten Maße in der Konfigurationsstruktur SMC_TrafoConfig_4AxisPalletizer ein. Tragen Sie dabei alle a_i mit positivem und alle d_i mit negativem Vorzeichen ein. Die Namen der Parameter entsprechen der Denavit-Hartenberg-Konvention.
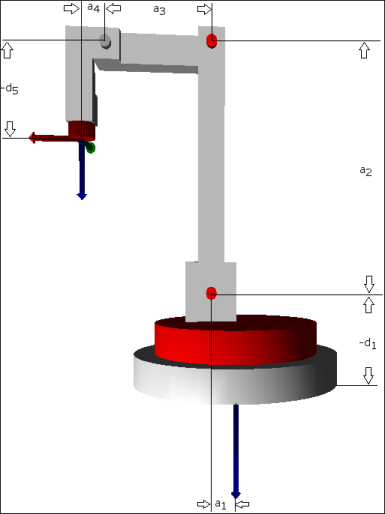
Gelenkoffset (sigma_i) | Gelenkabstand (d_i) | Armelementlänge (a_i) | Verwindung (alpha_i) | |
|---|---|---|---|---|
1 | 0° | d_1 | a_1 | 90° |
2 | -90° | 0 | a_2 | 0° |
3 | 90° | 0 | a_3 | 0° |
4 | 0° | 0 | a_4 | 90° |
5 | 0° | d_5 | 0 | 180° |
Programmierung im G-Code
Die Position des Greifers wird über X, Y und Z gesteuert. Die Drehung des Greifers um die Vertikale wird über die Zusatzachse C gesteuert. Die Winkel sind in Grad anzugeben.
Objekte
Die Datenstruktur SMC_TrafoConfig_4AxisPalletizer und die Funktionsbausteine SMC_Trafo_4AxisPalletizer und SMC_TrafoF_4AxisPalletizer werden mit der Bibliothek SM3_Transformation eingebunden. Eine Beschreibung der Parameter erhalten Sie, wenn Sie im Bibliotheksverwalter nach diesen Objekten suchen.