Übersicht der definierten Segmenttypen
CODESYS SoftMotion bietet verschiedene Segmenttypen für Kurvenscheiben an.
Je nach Kompilierungsformat wird nur ein Teil der Segmenttypen unterstützt:
XYVA: Nur Line und Poly5.
Segments: Es werden alle Segmenttypen unterstützt.
Segmenttyp | Parameter | Verlauf |
|---|---|---|
Poly7 | . Randbedingungen
| 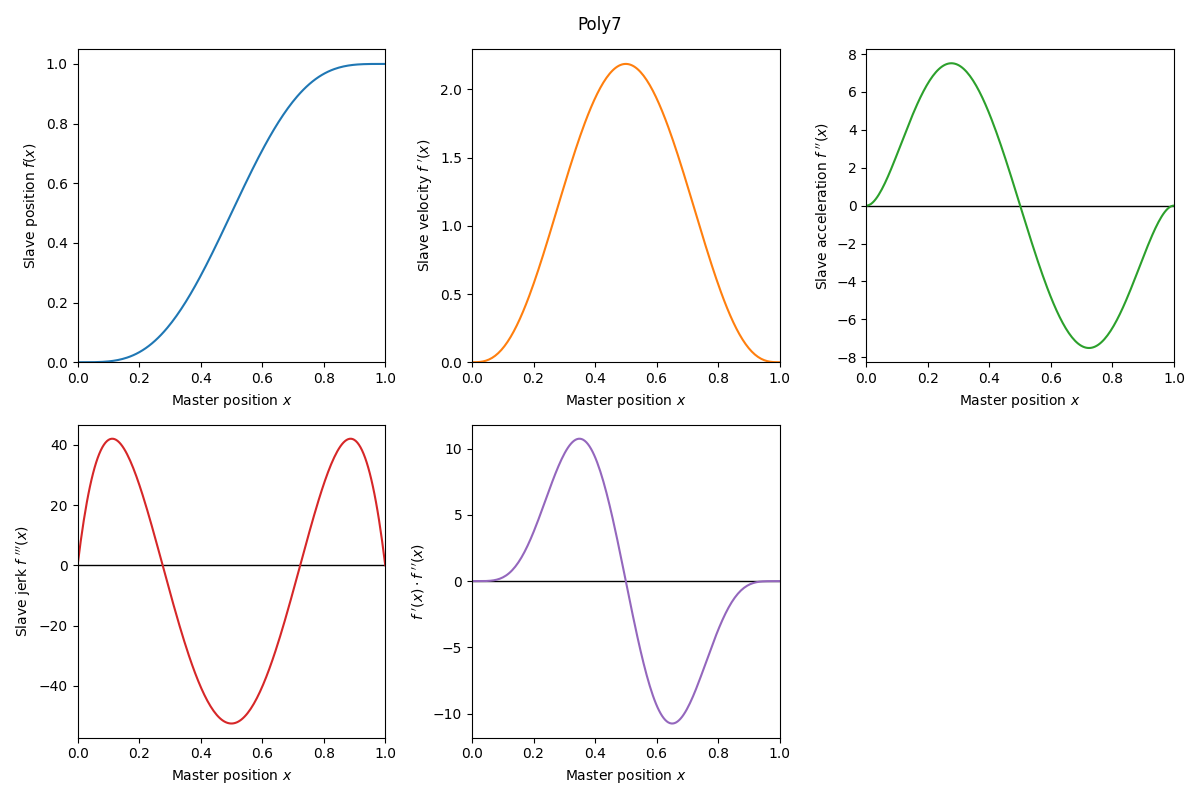 |
Poly5 | . Randbedingungen
| 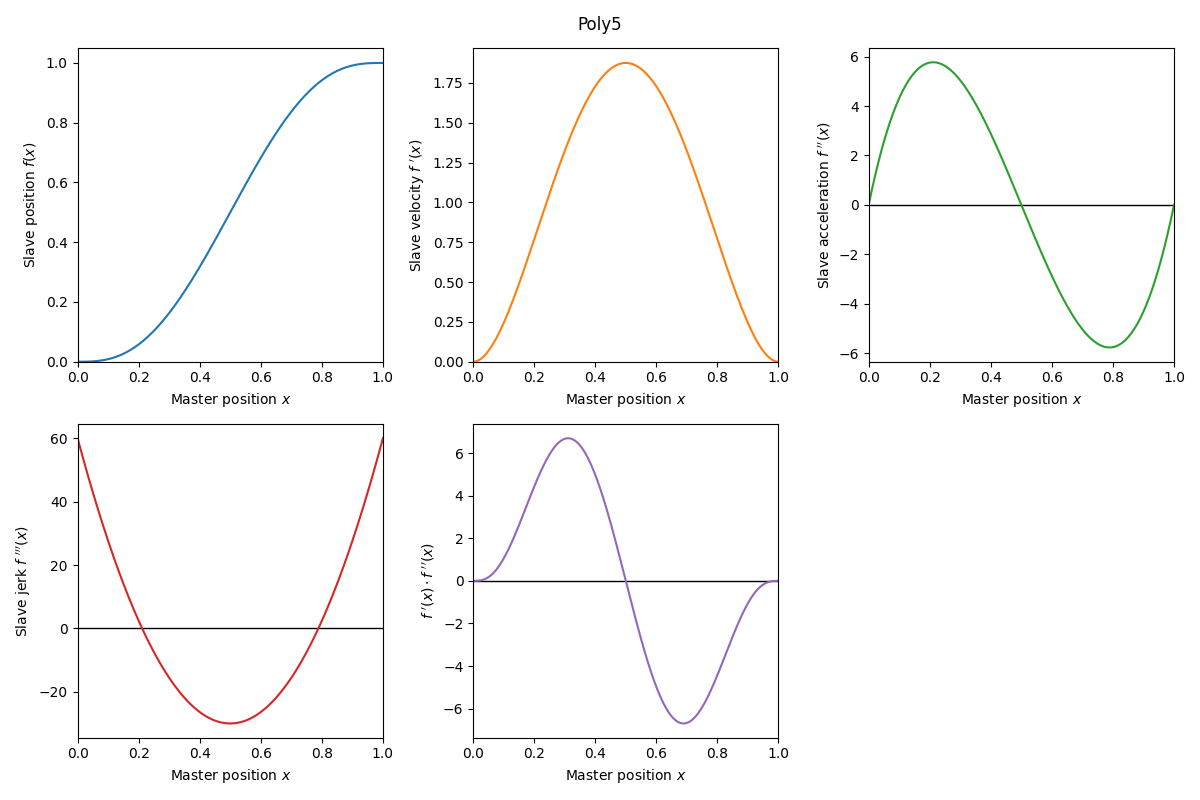 |
ModifiedSine | . Randbedingungen
. Segmentparameter
| 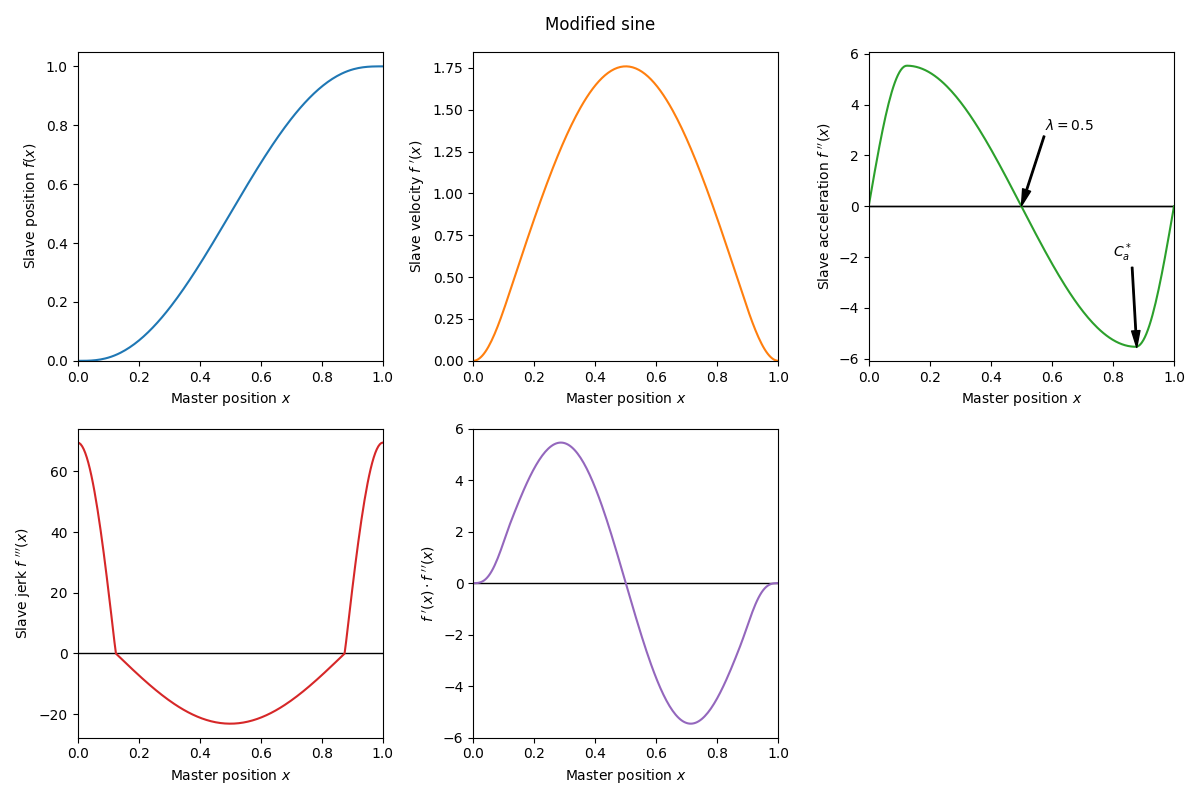 |
Line | . Randbedingungen
| 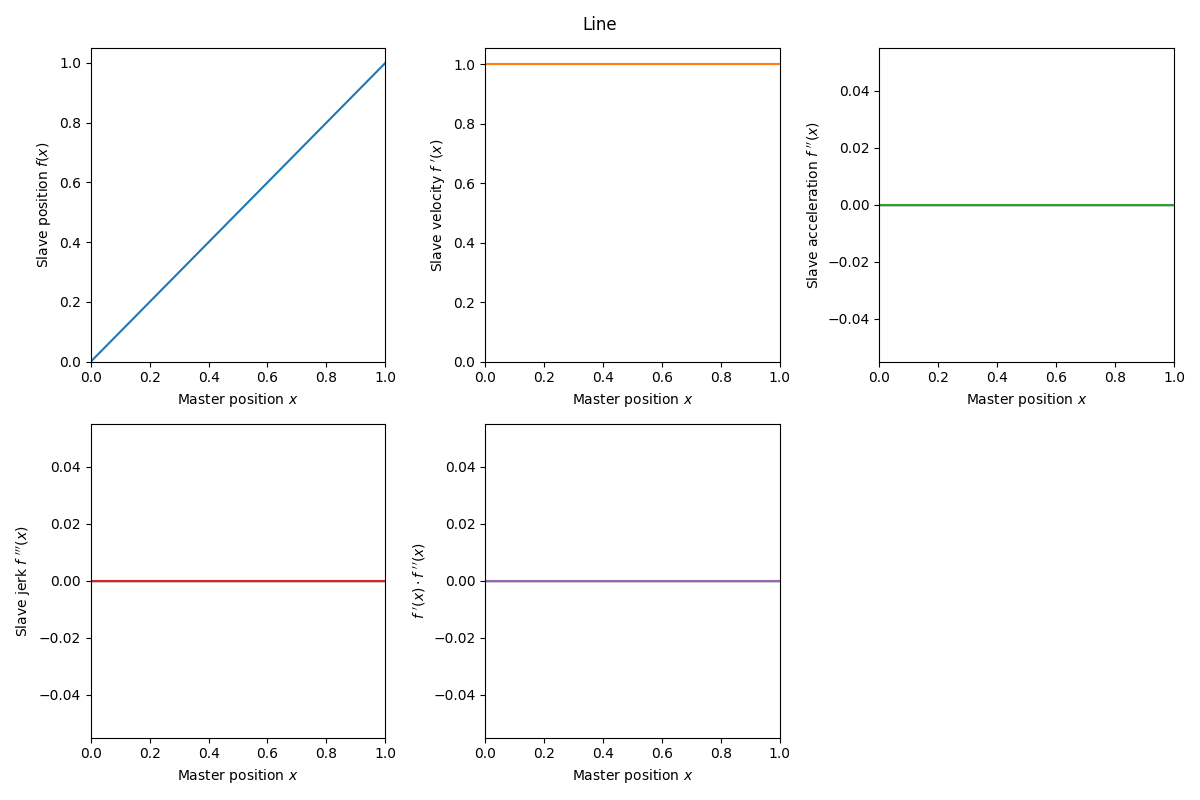 |
InclinedSine | . Randbedingungen
| 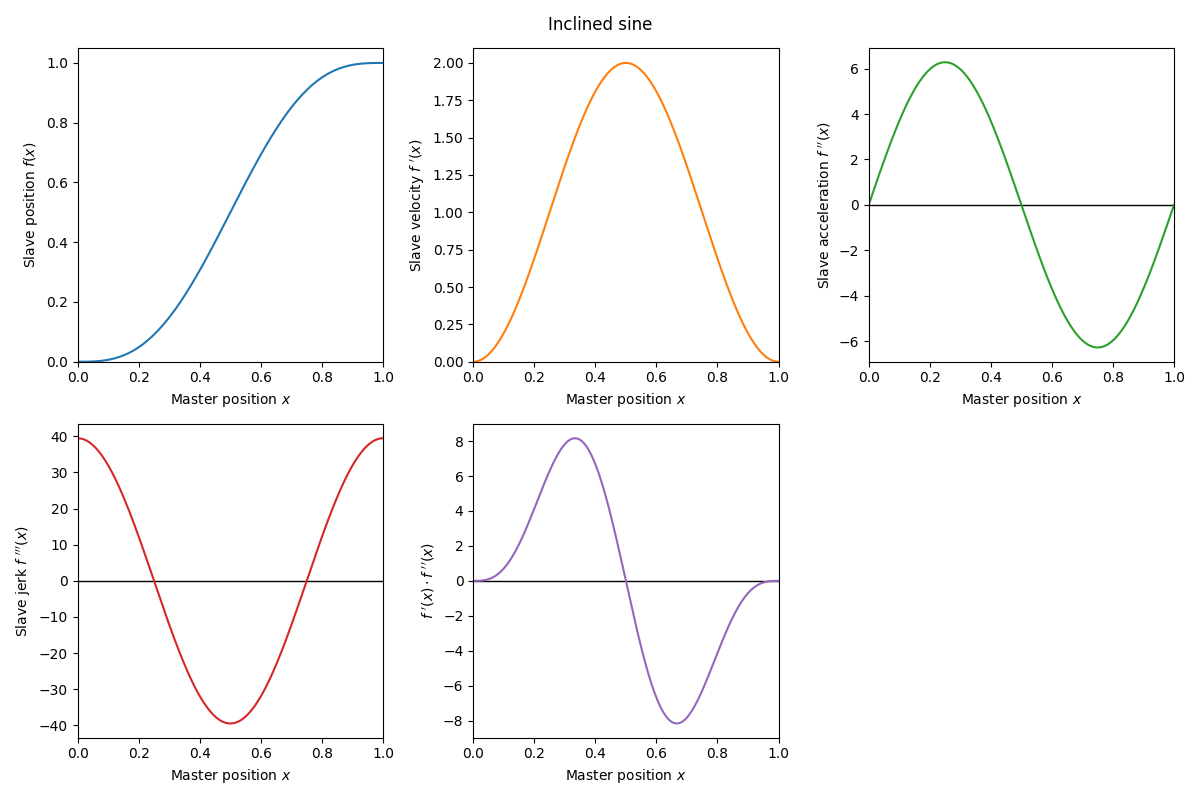 |
Die Auswahl des Segmenttyps hängt von der Applikation ab, da jeder Typ spezielle dynamische Eigenschaften hat. Je nach Bewegungsaufgabe (beispielsweise Rast - konstante Geschwindigkeit) gibt es verschiedene geeignete Segmenttypen.
Eine Übersicht bietet die nachfolgende Tabelle:
Rast (v=0, a=0) | konstante Geschwindigkeit (v≠0, a=0) | Umkehr (v=0, a≠0) | Bewegung (v≠0, a≠0) | |
|---|---|---|---|---|
Rast (v=0, a=0) |
|
|
|
|
konstante Geschwindigkeit (v≠0, a=0) |
|
|
|
|
Umkehr (v=0, a≠0) |
|
|
|
|
Bewegung (v≠0, a≠0) |
|
|
|
|