Registerkarte: Allgemein
Achstyp | |
Virtueller Modus |
Hinweis: Sie können den virtuellen Modus eines Antriebs auch in IEC-Code durch den Funktionsbaustein |
Modulo |
Modulowert [u]: Wert eines Zyklus (Modulo-Periode) Der Wert wird im Parameter Hinweis: Wenn Sie den Antriebstyp Modulo wählen, dann muss das Produkt |
Begrenzt |
Software Endschalter Aktiviert
|
Motortyp | |
Rotierend |
|
Linear |
|
Geschwindigkeitsrampentyp Legt das Geschwindigkeitsprofil für bewegungserzeugende Einachsbausteine und für Master/Slave-Module fest: Hinweis: Für die Robotik werden die Rampentypen Sin² und Quadratisch (geglättet) nicht unterstützt. | |
Trapezoid |
|
Sin² |
|
Quadratisch |
|
Quadratisch (geglättet) |
|
Identifikation | |
ID | Ganzzahliger Bezeichner. Sollte für jeden Antrieb eindeutig sein. Dieser Bezeichner wird beispielsweise bei Fehlern im SPS-Log ausgegeben um den Antrieb zu identifizieren. |
Totzeit | |
Zyklen | Die Totzeit in Zyklen zwischen der |
Dynamische Grenzen Die Grenzwerte werden von den PLCopen Part 4 Bausteinen berücksichtigt. Weiterhin werden sie von Bibliotheksbausteinen mit Namen | |
Geschwindigkeit [u/s²] | Grenzwert von Geschwindigkeit, Beschleunigung, Verzögerung und Ruck |
Beschleunigung [u/s²] | |
Verzögerung [u/s²] | |
Ruck [u/s³] | |


Softwaregrenzen | |
Aktiviert |
|
Software Fehlerreaktion . Ursachen für einen Softwarefehler
Für die Software-Fehlerreaktion wird die Verzögerung, die Max. Distanz sowie die Verzögerung der dynamischen Grenzen berücksichtigt. Dabei wird aus der maximalen Distanz ebenfalls eine Verzögerung berechnet. Für die Fehlerrampe wird die höchste dieser Verzögerungswerte verwendet. | |
Verzögerung [u/s²]: | Verzögerung für die Fehlerrampe |
Max. Distanz [u] | Optional Distanz, innerhalb der der Antrieb einen Stillstand erreicht haben muss, nachdem ein Fehler aufgetreten ist. |
Schleppfehlerüberwachung Reaktion des Systems auf einen erkannten Schleppfehler. Ein Schleppfehler wird erkannt, wenn der Unterschied zwischen Sollposition und kompensierter Istposition den Schleppfehlergrenzwert überschreitet. Die extrapolierte Istposition wird in folgender Formel berechnet:
Dieser Wert ist die um die Totzeit kompensierte Istposition der Achse. Hinweis: Wenn Sie den Schleppfehler überwachen, sollten Sie die Totzeit ermitteln und eintragen. Eine Beschreibung dazu finden Sie im Kapitel Istwerte, Sollwerte und Totzeit. Hinweis: Bei virtuellen Antrieben ist keine Schleppfehlerüberwachung verfügbar. | |
abgeschaltet | Keine Reaktion Die Schleppfehlerüberwachung ist deaktiviert. |
Antrieb ausschalten | Bit |
Quickstop durchführen | Bit |
eingeschaltet bleiben | Der Antrieb bleibt eingeschaltet, aber alle laufenden Bewegungen werden abrupt gestoppt. |
Schleppfehlergrenzwert: | Schleppfehlerüberwachung in der Steuerung Eine davon unabhängige Überwachung kann zusätzlich im Antrieb existieren, wird jedoch nicht über diesen Dialog konfiguriert. |
Für weitere Informationen siehe: Totzeit des Systems ermitteln
Die folgenden Bilder demonstrieren den Effekt der unterschiedlichen Rampentypen. Die Position ist in grün gezeichnet, die Geschwindigkeit in blau und die Beschleunigung in rot.
trapezoid Die Geschwindigkeit ist teilweise linear, jedoch stetig, wohingegen die teilweise konstante Beschleunigung Sprünge aufweist. | 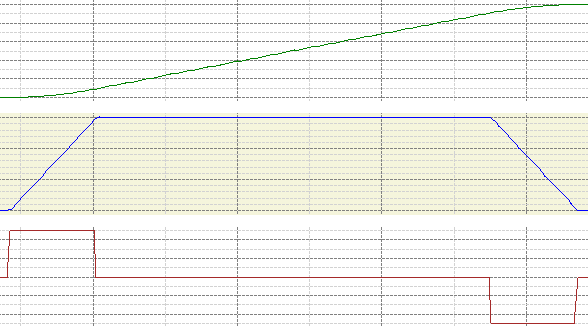 |
Sin² Die Knicke im Geschwindigkeitsprofil werden geglättet (durch Verwendung der Funktion sin² anstelle von Geraden), so dass die Sprünge in der Beschleunigung vermieden werden. Der Ruck kann bei diesem Rampentyp nicht vom Anwender beschränkt werden. Der eingestellte maximale Ruck wirkt sich nur aus, wenn zu Beginn der Bewegung die Beschleunigung ungleich 0 ist und die unterbrochene Brems- oder Beschleunigungsrampe nicht nahtlos fortgesetzt werden kann. Dann wird unter Berücksichtigung der Ruckbegrenzung zuerst die Beschleunigung auf 0 heruntergefahren, bevor mit der aktuellen Bewegung begonnen wird. Verglichen mit dem trapezförmigen Geschwindigkeitsprofil wird das Abbremsen in diesem Fall mehr Zeit einnehmen. | 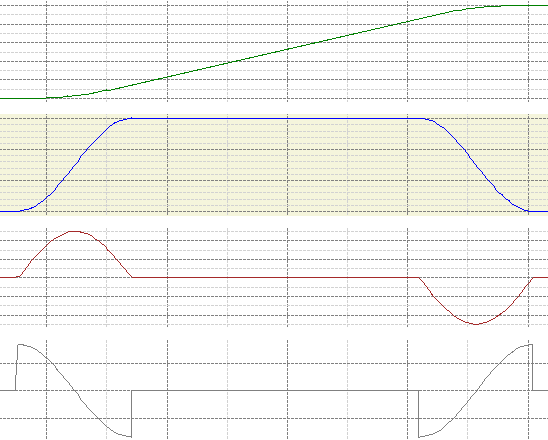 |
Quadratisch Die Beschleunigung ist stückweise linear und stetig, der Ruck weist Sprünge auf. Die Geschwindigkeit besteht aus quadratischen und linearen Abschnitten. | 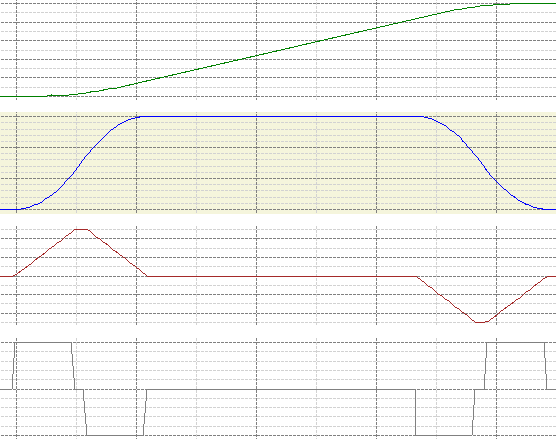 |
Quadratisch (geglättet) Die linearen Beschleunigungsrampen des quadratischen Rampentyps werden durch eine „glättende“ Funktion ersetzt, deren Steigung zu Beginn und am Ende 0 ist. Dadurch wird der Ruck ebenfalls stetig. Anmerkung: wird eine Bewegung unterbrochen, kann es trotzdem zu Sprüngen im Ruck kommen. | 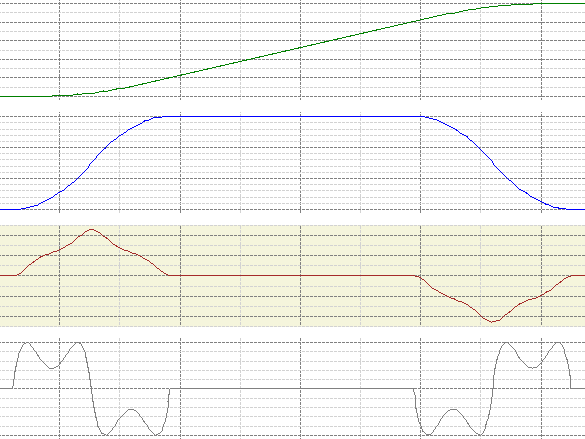 |
Für weitere Informationen siehe: Bewegungen unterbrechen