Koordinatensysteme
CODESYS SoftMotion Robotics bietet unterschiedliche Koordinatensysteme an, in denen Bewegungen kommandiert werden können.
Achskoordinatensystem (ACS)
Werkzeugkoordinatensystem (TCS)
Weltkoordinatensystem (WCS)
Maschinenkoordinatensystem (MCS)
Produktkoordinatensystem (PCS_1, PCS_2)
Koordinatensystem | Beschreibung |
|---|---|
Achskoordinatensystem ACS | Das Achskoordinatensystem definiert ein Koordinatensystem im Achsraum, bei dem jede Achse des Roboters eine Dimension aufspannt. Somit kann für jede Achse des Roboters eine Position vorgegeben werden. |
Werkzeugkoordinatensystem TCP | Das Werkzeugkoordinatensystem ist ein kartesisches Koordinatensystem, das im Tool-Center-Point (TCP) der Kinematik liegt. Seine Lage und Orientierung sind abhängig von der Position des Roboters. |
Weltkoordinatensystem WCS | Das Weltkoordinatensystem ist ein statisches kartesisches Koordinatensystem und bildet die Basis für alle folgenden Koordinatensysteme. Diese sind relativ zum Weltkoordinatensystem definiert. |
Maschinenkoordinatensystem MCS | Das Maschinenkoordinatensystem ist ein statisches kartesisches Koordinatensystem. Die Lage und Orientierung des MCS relativ zum echten Roboter werden von der Kinematik definiert. Mit Hilfe des Bausteins MC_SetCoordinateTransform kann das Koordinatensystem relativ zum Weltkoordinatensystem (WCS) verschoben werden. |
Produktkoordinatensystem PCS_1, PCS_2 | Die Produktkoordinatensysteme sind kartesische Koordinatensysteme, die vom Anwender definiert werden können. Sie werden relativ zum Weltkoordinatensystem (WCS) ausgedrückt und können sowohl statisch als auch dynamisch sein. . Statisch
. Dynamisch Mit Hilfe der folgenden Bausteine können dynamische Koordinatensysteme definiert werden: |
Initiale Lage und Orientierung der Koordinatensysteme
Die Kinematik des Roboters legt die initiale Lage und Orientierung der Koordinatensysteme fest. In der Dokumentation der Kinematik ist dies beschrieben.
die Lage und Orientierung des Maschinenkoordinatensystems (MCS) relativ zum echten Roboter
die Lage und Orientierung des Tool-Center-Points (TCP) relativ zum MCS und dadurch das Werkzeugkoordinatensystem (TCS)
die Nullstellung des Roboters sowie die Dreh- oder Verfahrrichtungen der einzelnen Achsen
Das Weltkoordinatensystem (WCS), sowie die Produktkoordinatensysteme (PCS_1, PCS_2), sind initial nicht verschoben und identisch zum Maschinenkoordinatensystem.
Mehrere Roboter und Werkstücke
Die Lage und Orientierung der Koordinatensysteme werden pro Roboter definiert. Wenn mehrere Roboter zusammen arbeiten, kann es nützlich sein, das Weltkoordinatensystem (WCS) als gemeinsames Basiskoordinatensystem festzulegen. Ausgehend von diesem Koordinatensystem können die Maschinenkoordinatensysteme (MCS) und Produktkoordinatensysteme (PCS_1, PCS_2) der einzelnen Roboter verschoben werden.
Beispiel
Beispiel anhand eines Roboters mit zwei Drehgelenken (a0 und a1)
Kinematik
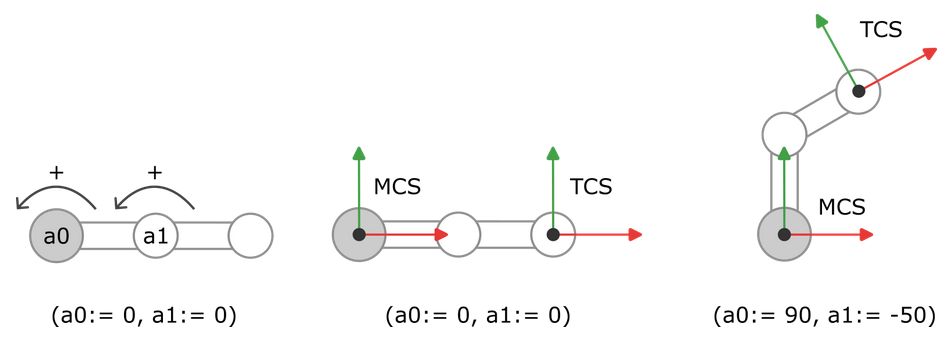
Die Kinematik definiert die Nullstellung des Roboters, wie nachfolgend dargestellt. Der Ursprung des Maschinenkoordinatensystem liegt in der Drehachse von Achse a0. Die X-Achse zeigt in Richtung des ersten Glieds, wenn die Position der ersten Achse a0 gleich 0 ist. Die Y-Achse zeigt in Richtung des ersten Glieds, wenn die Position der ersten Achse a0 auf +90° steht. Eine Drehung gegen den Uhrzeigersinn entspricht der positiven Drehrichtung. Der Tool-Center-Point (TCP) liegt am Ende des zweiten Glieds des Roboters, wie nachfolgend dargestellt, und bildet den Ursprung des TCS. Das TCS ist so ausgerichtet, dass die X-Achse entlang des zweiten Glieds verläuft.
Achskoordinatensystem (ACS)
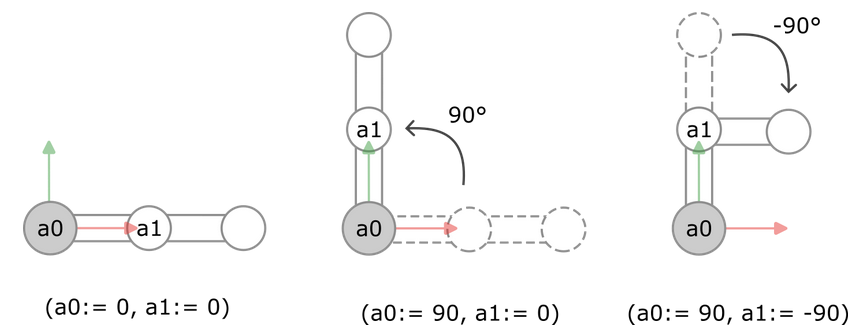
Die Kinematik hat die Nullstellung des Roboters und die Drehrichtung der einzelnen Achsen vorgegeben. Da der Roboter aus zwei Achsen a0 und a1 besteht, können wir im ACS die Positionen von Achse a0 und a1 vorgeben.
Im ersten Bild geben wir die Position (a0:= 0, a1:= 0) vor. Dies entspricht der Nullstellung des Roboters.
Im zweiten Bild geben wir die Position (a0:= 90, a1:= 0) vor. Ausgehend von der Nullstellung ist die erste Achse a0 um 90° in positive Drehrichtung gedreht. Die zweite Achse a1 bleibt in der Nullstellung.
Im dritten Bild geben wir die Position (a0:= 90, a1:= -90) vor. Ausgehend von der Nullstellung ist die erste Achse a0 um 90° in positive Drehrichtung gedreht (wie im zweiten Bild). Zusätzlich wird die zweite Achse a1 um 90° in negative Drehrichtung gedreht.
Werkzeugkoordinatensystem (TCS)
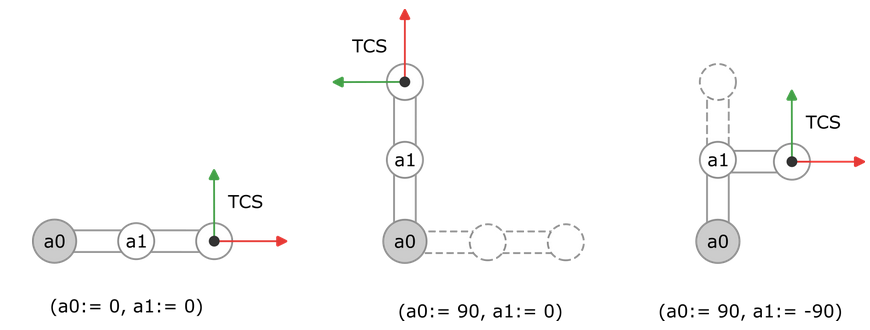
Die Kinematik definiert die Lage und Orientierung des TCP und TCS. Je nachdem wie wir den Roboter bewegen, ändert sich auch die Lage und Orientierung des TCS.
Weltkoordinatensystem (WCS), Maschinenkoordinatensystem (MCS) und Produktkoordinatensystem (PCS_1, PCS_2)
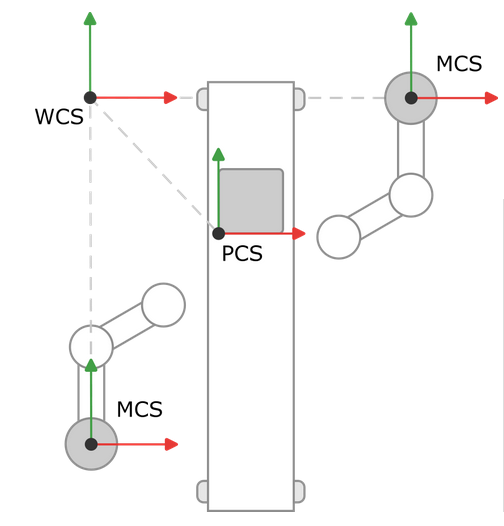
In einer Produktionshalle stehen zwei Roboter links und rechts eines Förderbandes, die Produkte auf dem Förderband bearbeiten sollen. Wir definieren ein gemeinsames Weltkoordinatensystem und legen es in die linke obere Ecke unserer Produktionshalle. Ausgehend von diesem Koordinatensystem bestimmen wir den Abstand und Verdrehung zu den Maschinenkoordinatensystemen sowie dem Produkt und verschieben die Koordinatensysteme entsprechend.
Im Beispiel sind alle Koordinatensysteme gleich ausgerichtet, wir müssen die Koordinatensysteme also nur verschieben. Das Maschinenkoordinatensystem des linken Roboters ist in Y-Richtung verschoben, das Maschinenkoordinatensystem des rechten Roboters in X-Richtung und das Produktkoordinatensystem sowohl in X- als auch Y-Richtung.