Konfigurationen von Kinematiken
Eine Kinematikkonfiguration beschreibt die Anordnung der Achsen einer Achsgruppe zueinander. Je nach Kinematik sind bei gleicher TCP-Position mehrere Konfigurationen möglich.
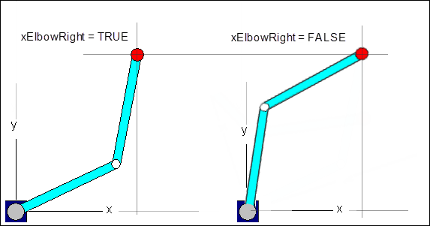
Am Beispiel des Scara 2 sind zwei mögliche Konfigurationen dargestellt.
Die Achsgruppe hat eine aktive Konfiguration, die nicht zwingend den aktuellen Achsstellungen entsprechen muss. Wenn eine Bewegung kommandiert wird, dann wird die Zielposition gegebenenfalls in Achskoordinaten umgewandelt. Dafür wird die zum Zeitpunkt der Kommandierung aktive Konfiguration verwendet.
Diese aktive Konfiguration kann mit dem Funktionsbaustein SMC_SetKinConfiguration gesetzt werden. Bei der Initialisierung und bei jeder Änderung der Kinematik nimmt die Achsgruppe die Standardkonfiguration der Kinematik an. Jede Kinematik mit Konfiguration bringt eine Standardkonfiguration mit.
Tipp
Eine CP-Bewegung zwischen zwei Konfigurationen ist nicht möglich. In diesem Fall muss die Positionierung über eine PTP-Bewegung erfolgen.
Tipp
Die aktuelle Konfiguration kann mit dem Funktionsbaustein MC_GroupReadActualPosition ermittelt werden.
Konfiguration für eine Kinematik setzen
Jede Kinematik mit Konfiguration hat einen eigenen Baustein zum Berechnen der Konfigurationsdaten. Der Name dieses Funktionsbausteins entspricht dem Namen der Kinematik plus Postfix _config. Der Baustein wandelt die verschiedenen Konfigurationen in den Datentyp ConfigData um. Dieser Datentyp wird dem Funktionsbaustein SMC_SetKinConfiguration übergeben.
Aufruf des Funktionsbausteins
Kin_Scara2_Z_Configaus der BibliothekSM3_Transformation. EingangxElbowRight= TRUEFunktionsbaustein liefert die Konfigurationsdaten vom Datentyp
ConfigDatazurück.Aufruf des Funktionsbausteins
SMC_SetKinConfigurationaus der BibliothekSM3_Robotics. EingangConfigDatamit den vorher ermittelten Konfigurationsdaten belegen.Die aktive Konfiguration des Scara 2 ist gesetzt.
VAR
config: TRAFO.Kin_Scara2_Z_Config;
skc: SMC_SetKinConfiguration;
END_VAR
config(xElbowRight := TRUE);
skc(AxisGroup := Scara2, Execute := TRUE, ConfigData := config.Config);Behandlung von gekoppelten Kinematiken
Eine gekoppelte Kinematik liegt vor, wenn gleichzeitig eine Positionierkinematik und eine Orientierungskinematik verwendet werden. In diesem Fall ergibt sich die „gekoppelte“ Konfiguration aus den beiden einzelnen Konfigurationen durch den Aufruf von Kin_Coupled_Config aus der Bibliothek SM3_Transformation. Dabei werden dem Funktionsbaustein an den Eingängen die Konfiguration der Positionierkinematik und der Orientierungskinematik zur Verfügung gestellt.
Für weitere Informationen siehe: Rotatorische Achsen mit einem Wertebereich von mehr als 360°