Elektronisches Getriebe, Phasenversatz und Kompensation von Getriebespiel
Sehen Sie hierzu das Beispiel BasicMotion_SynchronizedMotion.project im Installationsverzeichnis von CODESYS unter ..\CODESYS SoftMotion\Examples.
Diese Beispiel zeigt die kombinierte Verwendung eines elektronischen Getriebes mit einem Phasenversatz und Getriebespielkompensation.
Aufbau der Applikation
Die Applikation besteht aus einer einfachen Zustandsmaschine im Programm PLC_PRG und einem Trace, mit dem Sie die Funktionsweise der Funktionsbausteine nachvollziehen können.
Freigeben der Achsen mit
MC_Power(STATE_POWER).Starten der Synchronbewegungen und Verfahren der Master-Achse kontinuierlich zwischen Position 0 und Position 100 (
STATE_COMMAND_POS_0undSTATE_COMMAND_POS_1)
Verwendung
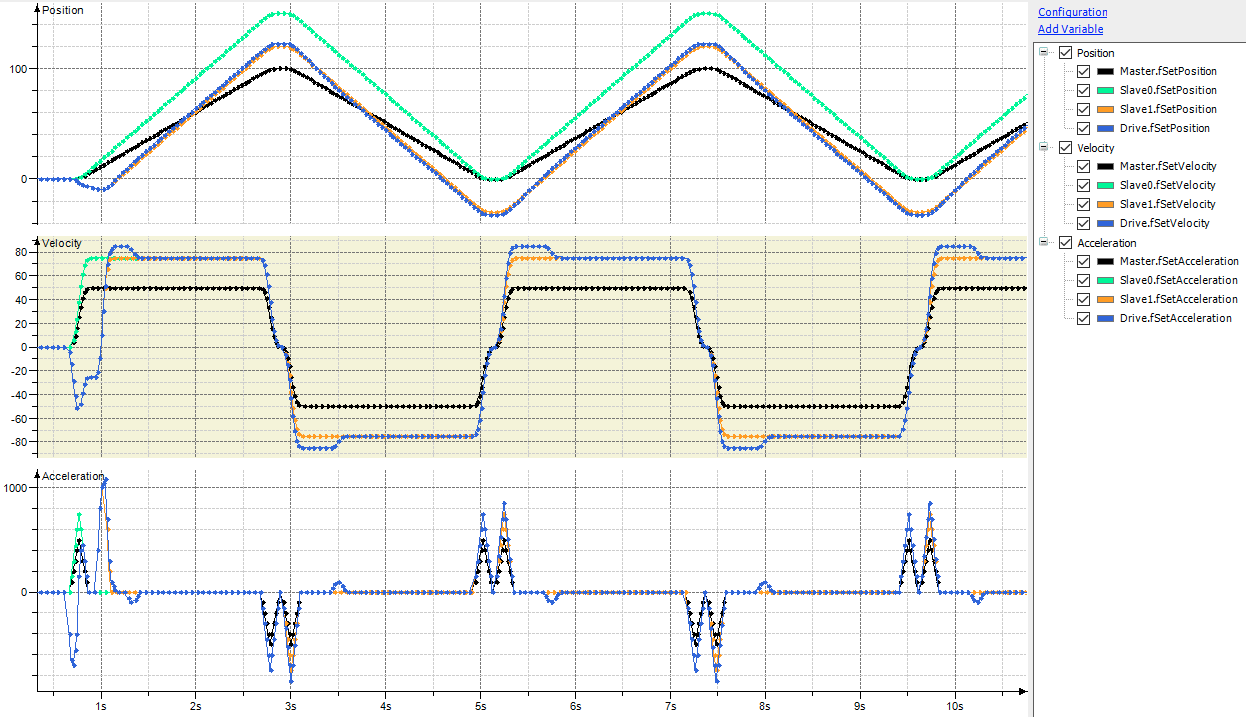
Die Master-Achse (im Trace-Diagramm schwarz) fährt kontinuierlich zwischen Position 0 und Position 100 hin und her mit maximaler Geschwindigkeit von 50 Einheiten pro Sekunde.
Ein elektronisches Getriebe (MC_GearIn) mit Getriebeverhältnis 2:3 setzt die Master-Bewegung auf die Achse Slave0 um (im Trace-Diagramm grün). Die aus dem Getriebe resultierende maximale Geschwindigkeit ist 75 Einheiten pro Sekunde.
Darauf wird ein Phasenversatz (MC_Phasing) von 30 Einheiten auf die Achse Slave1 aufgebracht (im Trace-Diagramm orange). Die Geschwindigkeit ist, bis auf die Einrampphase, identisch zur Achse Slave0.
Schließlich wird noch eine Getriebespielkompensation verwendet, um die Bewegung auf Achse Drive zu bringen (im Trace-Diagramm blau). Für das Getriebespiel ist zu illustrativen Zwecken ein unrealistisch hoher Wert von 5 Einheiten eingestellt. Das Diagramm zeigt eine Ausgleichsbewegung zu Beginn der Bewegung und bei jeder Umkehr der Bewegungsrichtung.