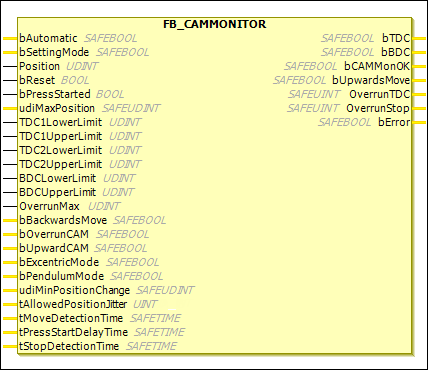
FB_CAMMONITOR
Beschreibung Funktionsbaustein
Mit dem FB_CAMMONITOR kann ein elektronisches Nockenschaltwerk realisiert werden. Neben dem Exzenterbetrieb wird auch der Pendelbetrieb unterstützt.
Exzenterbetrieb:
Im Exzenterbetrieb ist nur eine Drehrichtung zulässig.
Es wird überprüft, ob die Position nach einem Takt spätestens nach dem oberen Umkehrpunkt (TDC: Top Dead Center) plus maximalem Nachlauf (
OverrunMax) stehen bleibt.OverrunTDCgibt den aktuellen Nachlauf bzw. die aktuelle Position nach TDC aus.Der untere Umkehrpunkt (BDC: Bottom Dead Center) wird mit einem unteren und oberen Limit angegeben. Nachdem BDC überschritten wurde, ist die Presse in einer Aufwärtsbewegung. Diese Information wird am Ausgang
bUpwardsMoveausgegeben.Wenn die Presse zum Stillstand kommt, ohne wieder TDC erreicht oder überschritten zu haben oder sich die Drehrichtung umkehrt, wird sofort der Ausgang
bCamMonOKaufFALSEgesetzt.Erst nach Erreichen des Stillstandes ist ein neuer Takt zulässig, nachdem am Eingang
bReseteine fallende Flanke erkannt wird.Über den Eingang
bBackwardsMovewird dem Baustein mitgeteilt, dass eine Rückwärtsbewegung der Presse erlaubt ist. Dies ist nur zulässig, wenn sich die Position zwischenTDC1UpperLimitundBDCLowerLimitbefindet. Die Rückwärtsbewegung endet mit Erreichen vonTDC1UpperLimit.Im Exzenterbetrieb können am Eingang
bUpwardCAMein Aufwärtsnocken und am EingangbOverrunCAMein Nachlaufnocken angeschlossen werden. Ist der EingangbUpwardCAMaktiv, wird geprüft, ob nach BDC der Aufwärtsnocken gesetzt wird und bei 0° wieder rückgesetzt wird. Ist der EingangbOverrunCAMaktiv, wird geprüft, ob nachTDC1LowerLimitder Nachlaufnocken gesetzt ist und gesetzt bleibt, während die Presse im Stillstand ist. Erst mit Beginn des nächsten Takts darf der Nachlaufnocken rückgesetzt werden. Eine Rückwärtsbewegung der Presse ist nur zulässig, wenn die EingängebUpwardCAMundbOverrunCAMFALSEsind. Die Rückwärtsbewegung endet, wenn der EingangbOverrunCAMTRUEwird.Pendelbetrieb:
Im Pendelbetrieb sind beide Drehrichtungen zulässig. Es werden hier zwei obere Umkehrpunkte (TDC: Top Dead Center) angegeben.
Da die Kurve, mit der die Presse gefahren werden soll, für jedes Produkt angepasst werden kann bzw. muss, werden bei den Grenzwerten für die beiden TDCs der maximale Bereich des Pendelhubs eingestellt.
Es wird geprüft, ob
TDC1undTDC2niemals überschritten werden. Sollte dies trotzdem passieren, wird der AusgangbCamMonOKaufFALSEgesetzt. Beim Taktbeginn (fallende Flanke am EingangbReset) darf die Presse mit beliebiger Bewegung (Pulsieren, Umkehr, …) starten, bis der BDC erreicht ist. Danach ist nur noch die Aufwärtsbewegung zulässig. Die Aufwärtsbewegung wird als Signal am AusgangbUpwardsMoveausgegeben.Der untere Umkehrpunkt (BDC: Bottom Dead Center) wird mit einem unteren und einem oberen Grenzwert angegeben.
Ein erneuter Start wird über den Eingang
bResetfreigeschaltet. Bewegt sich die Presse in Abwärtsrichtung, ohne dass eine fallende Flanke am EingangbReseterkannt wurde, erfolgt ein sofortiger Stopp, indem der AusgangbCamMonOKaufFALSEgesetzt wird.Die optionalen Eingänge
bUpwardCAMundbOverrunCAMfür den Anschluss eines Aufwärts- und eines Nachlaufnockens werden im Pendelbetrieb nicht unterstützt. Sind sie fälschlicherweise aktiv, wird ein Fehler gesetzt.
FB_CAMMONITOR
Der FB_CAMMONITOR stellt dem Anwender einen sicheren Auswertebaustein zur Verfügung, der entsprechend der eingestellten Festwerte, in Abhängigkeit der aktuellen Position die Nocken (bTDC, bBDC, bUpwardsMove) sicher ausgeben kann.
Baustein Ausgang bUpwardsMove
Der Ausgang bUpwardsMove gibt dem Anwender die Information, dass sich die Presse in einer Aufwärtsbewegung nach Durchlaufen von BDC befindet. Dieses Signal kann für das Muting von beispielsweise Lichtgittern verwendet werden bzw. für die Übernahme des Steuerbefehls an der Presse.
Positionserfassung der Presse
Die Positionserfassung muss entsprechend des erforderlichen SIL oder Performance Levels realisiert werden. Der Nachweis, dass dies erfüllt ist, muss durch den Anwender bzw. Maschinenbauer erfolgen.
Der Positionswert muss sicher aus z.B. mehreren Analogwerten plausibilisiert werden oder auf andere sichere Art und Weise dem Baustein zur Verfügung gestellt werden. Ersteres kann beispielsweise über den Baustein COMPARE realisiert werden. Zusätzlich kann über den Eingang bPressStarted eine Erwartungshaltung generiert werden, indem dem Baustein die Anforderung einer Bewegung mitgeteilt wird. Der Baustein überwacht dann, dass auch eine Positionsänderung innerhalb der eingestellten Parameter stattfindet.
Exzenter-/Pendelbetrieb
Für den Exzenterbetrieb wird der Eingang bExcentricMode gesetzt und die Eingänge TDC2UpperLimit und TDC2LowerLimit müssen inaktiv oder 0 sein.
Für den Pendelbetrieb wird der Eingang bPendulumMode gesetzt und die Eingänge TDC2UpperLimit und TDC2LowerLimit müssen aktiv und ungleich 0 sein.
EL6900
Der Baustein FB_CAMMONITOR wird von der EL6900 nicht unterstützt.
Name | Datentyp | Initialwert | Beschreibung, Parameterwerte |
|---|---|---|---|
|
|
|
|
|
|
| Parameterübernahme im Einrichtbetrieb Ist der Eingang auf |
|
|
| Pressenposition: Der Positionswert muss sicher aus mehreren Analogwerten plausibilisiert werden oder auf andere sichere Art und Weise dem Baustein zur Verfügung gestellt werden, entsprechend dem erforderlichen SIL/Performance Level. Erlaubte Datentypen: |
|
|
| Reset-Eingang: Vor jedem Pressen-Start muss eine fallende Flanke am Eingang |
|
|
| Ist der Eingang aktiv, wird bei einer logischen 1 am Eingang eine Bewegung bzw. Änderung der Position erwartet. Hierzu müssen die Parameter |
|
|
| Maximal erlaubter Positionswert während einer 360°-Bewegung der Presse. Nur konstanter Wert erlaubt (keine Variable). |
|
|
| Exzenterbetrieb: Untergrenze des oberen Umkehrpunkts (TDC: Top Dead Center). Dieser liegt links vom oberen Umkehrpunkt. Pendelbetrieb: Untergrenze des oberen Umkehrpunkts in der linken Hälfte der Presse. Der Wert muss größer als der untere Umkehrpunkt und kleiner als Erlaubte Datentypen: Konstanter Wert und Variable erlaubt. |
|
|
| Exzenterbetrieb: Obergrenze des oberen Umkehrpunkts. Dieser liegt rechts vom oberen Umkehrpunkt. Pendelbetrieb: Obergrenze des oberen Umkehrpunkts in der linken Hälfte der Presse. Der Wert muss größer als TDC1LowerLimit und kleiner als udiMaxPosition sein. Erlaubte Datentypen: Konstanter Wert und Variable erlaubt. |
|
|
| Exzenterbetrieb: Nicht verwendet Pendelbetrieb: Untergrenze des oberen Umkehrpunkts in der rechten Hälfte der Presse. Der Wert muss größer als Erlaubte Datentypen: Konstanter Wert und Variable erlaubt. |
|
|
| Exzenterbetrieb: Nicht verwendet Pendelbetrieb: Obergrenze des oberen Umkehrpunkts in der rechten Hälfte der Presse. Der Wert muss größer als 0 und kleiner als Erlaubte Datentypen: Konstanter Wert und Variable erlaubt. |
|
|
| . Untergrenze des unteren Umkehrpunkts
Erlaubte Datentypen: Konstanter Wert und Variable erlaubt. |
|
|
| . Obergrenze des oberen Umkehrpunkts
Erlaubte Datentypen: Konstanter Wert und Variable erlaubt. |
|
|
| Exzenterbetrieb: Pendelbetrieb: Nicht verwendet Erlaubte Datentypen: Konstanter Wert und Variable erlaubt. |
|
|
| Exzenterbetrieb: Mit dem Eingang kann die Presse in Rückwärtsrichtung bewegt werden. Dies ist möglich bis Pendelbetrieb: Nicht verwendet |
|
|
| Exzenterbetrieb: Optional. Hier kann ein Nachlaufnocken angeschlossen werden. Es wird geprüft, dass der Nachlaufnocken nach TDC gesetzt wird und gesetzt bleibt während die Presse im Stillstand ist. Erst beim Starten des nächsten Takts darf der Nachlaufnocken zurückgesetzt werden. Pendelbetrieb: Nicht verwendet |
|
|
| Exzenterbetrieb: Optional. Hier kann ein Aufwärtsnocken angeschlossen werden. Es wird geprüft, dass der Nocken nach BDC gesetzt wird und bei 0° wieder zurückgesetzt wird. Pendelbetrieb: Nicht verwendet |
|
|
|
Es darf nur einer der Eingänge Nur konstanter Wert erlaubt (keine Variable) |
|
|
|
Es darf nur einer der Eingänge Nur konstanter Wert erlaubt (keine Variable) |
|
|
| Wenn der Eingang |
|
|
| Erlaubter Jitter in ms für Position im Stillstand Nur konstanter Wert erlaubt (keine Variable) |
|
|
| Wenn der Eingang |
|
|
| Wenn der Eingang |
|
|
| Zeitfenster in ms für die Stillstandserkennung, innerhalb der sich die Position nur um den Nur konstanter Wert erlaubt (keine Variable) |
Name | Datentyp | Initialwert | Beschreibung, Parameterwerte |
|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
Nach dem Starten der Gruppe, in der der Baustein programmiert ist, wird |
|
|
| Exzenterbetrieb: Pendelbetrieb: Abhängig davon, in welcher Hälfte die Bewegung gestartet wurde, wird der Ausgang in der anderen Hälfte gesetzt. Der Ausgang wird gesetzt von |
|
|
| Exzenterbetrieb: Differenz zwischen Pendelbetrieb: Nicht verwendet |
|
|
| Differenz zwischen der Position bei fallender Flanke von |
|
|
|
|