Registerkarte: EtherCAT-Master - Allgemein
Die Registerkarte dient der Konfiguration der Grundeinstellungen für den EtherCAT-Master. Die voreingestellten Grundeinstellungen stammen aus der Gerätebeschreibungsdatei.
Einstellungen der Konfigurationsparameter
Wichtig
Der Autokonfigurationsmodus (Option Autoconfig Master/Slaves) ist standardmäßig aktiviert und für Standardapplikationen ausreichend. Wenn der Modus nicht aktiviert ist, müssen alle Konfigurationseinstellungen für Master und Slave(s) manuell vorgenommen werden und es sind Expertenkenntnisse erforderlich! Zur Konfiguration von Slave-zu-Slave-Kommunikation muss die Autokonfigurationsmodus-Option ausgeschaltet werden.
Autoconfig Master/Slaves |
Auch wenn diese Option des Masters aktiviert ist, kann für jeden einzelnen Slave explizit ein Expertenmodus aktiviert werden, der die manuelle Bearbeitung der automatisch generierten Prozessdaten-Konfiguration erlaubt. |

Zieladresse (MAC) | MAC-Adresse des Teilnehmers im EtherCAT-Netzwerk, der die Telegramme erhalten soll. . Optionen
|
Quelladresse (MAC) | MAC-Adresse der Steuerung (Zielsystem) bzw. Netzwerkname (Name der Karte, d.h. SPS (Zielsystem)) |
Netzwerkname | Name bzw. MAC des Netzwerks, abhängig davon, welche der folgenden Optionen aktiviert ist: |
Netzwerk über MAC auswählen |
|
Netzwerk über Namen auswählen |
|
Durchsuchen | Durchsucht das Netzwerk nach den MAC-IDs bzw. Namen der gerade verfügbaren Zielgeräte. |
Diese Einstellungen werden nur eingeblendet, wenn die Option Redundancy aktiviert ist. Hier werden die Parameter des zusätzlichen Teilnehmers gemäß der Beschreibung zu EtherCAT-NIC-Einstellungen definiert. |
Zykluszeit (µs) | Zeitspanne, nach der ein neues Datentelegramm auf dem Bus versendet wird. Wenn die Funktionalität Verteilte Uhren im Slave aktiviert ist, wird die hier angegebene Master-Zykluszeit zu den Slave-Uhren übertragen. So kann eine genaue Synchronisation des Datenaustausches erreicht werden, die vor allem wichtig ist, wenn räumlich verteilte Prozesse gleichzeitige Aktionen erfordern. Gleichzeitige Aktionen sind z.B. Applikationen, in denen mehrere Achsen gleichzeitig koordinierte Bewegungen ausführen müssen. Eine sehr präzise, netzwerkweite Zeitbasis mit einem Jitter von wesentlich weniger als 1 Mikrosekunde kann auf diese Art erreicht werden. |
Sync-Offset | Parameter zum Einstellen der Verzögerungszeit zwischen der DC-Zeitbasis des EtherCAT-Slaves und dem Zyklusstart der SPS. Der Standardwert ist 20 %, diese Zeit ist für alle Slaves mit DC gleichzeitig aktiv. Ein Offset von 20 % bedeutet, dass der Timer-Interrupt im EtherCAT-Slave 20 % vor dem nächsten IEC-Zyklus stattfindet. Dies bedeutet, bei
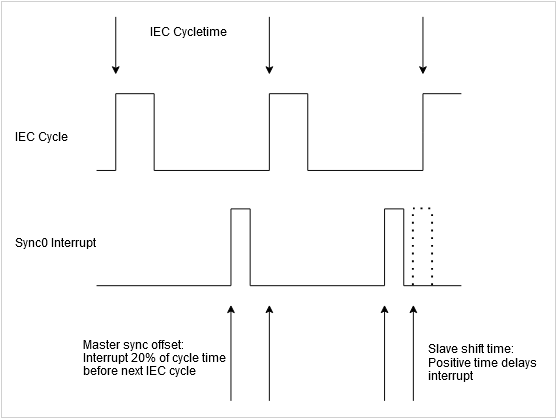 Ist bei dem entsprechenden Slave DC aktiv, so kommen die Standardeinstellungen aus der jeweiligen ESI-Datei. Der Gerätehersteller kann hier zusätzliche Offsets in Form der Shift time für die beiden Timer-Interrupts Sync 0 und Sync 1 definieren. Wenn beim Slave die Experteneinstellung aktiviert ist, können diese Zeiten manuell verändert werden. Die Shift time wird in das Register WichtigEs muss auf alle Fälle vermieden werden, dass der Sync-Interrupt in der zeitlichen Nähe des IEC-Zyklus stattfindet, da ansonsten einen Zyklus lang keine Daten vorhanden sein können und Geräte in Synchronisationfehler gehen. Dazu müssen beide Offsets vom Master und der individuelle Offset jedes Slaves berücksichtigt werden. Bei der normalen Einstellung von 20 % Offset für den Master und 0 % bei den Slaves kann der Jitter des IEC-Zyklus und den Verzögerungen des Sendezeitpunkts durch das System maximal um +80 % und -20 % betragen. |
Sync Window Monitoring |
|
Sync Window | Zeit für Sync Window Monitoring. Wenn die Synchronisierung aller Slaves innerhalb dieses Zeitfensters liegt, wird die Variable |
LRW anstelle von LWR/LRD verwenden |
|
Meldungen pro Task aktivieren |
|
Slaves automatisch neustarten |
|
Diese Funktionalität ermöglicht die Kommunikation von einem externen Gerätekonfigurations-Tool über das Mailbox-Gateway zu den EtherCAT-Geräten. Die Verkabelung muss nicht geändert werden. Generell können alle spezifizierten Mailbox-Protokolle (CoE, FoE, VoE, SoE) verwendet werden. | |
Aktivieren |
|
IP-Adresse | IP-Adresse für die UDP-Verbindung. Der UDP-Port ist festgelegt auf 0x88a4. Optionen
|
Diese Einstellungen können nur bearbeitet werden, wenn die Option Autoconfig Master/Slaves deaktiviert ist, ansonsten werden sie automatisch vorgenommen und sind hier nicht sichtbar. | |
Abbild Eingabeadresse | Erste logische Adresse des ersten Slaves für Eingangsdaten |
Abbild Ausgabeadresse | Erste logische Adresse des ersten Slaves für Ausgangsdaten |