Funktionen
CANopen Safety
CANopen Safety ist als europäische Norm (EN 50325-5) veröffentlicht. Damit können Daten über CAN-Netzwerke übertragen werden, die den Anforderungen für SIL-3-Anwendungen genügt. Diese sicherheitsgerichtete Datenübertragung kann parallel zu einer bestehenden CANopen-Datenübertragung stattfinden. CODESYS CANopen Safety unterstützt die Sicherheitsanforderungen nach SIL2.
Neben den herkömmlichen CANopen-Diensten zur Datenübertragung wie SDO und PDO wird für die Safety-Erweiterung mit dem SRDO-Dienst (Safety Related Data Object) ein spezieller Dienst für diese Datenübertragung definiert. Hinsichtlich der Konfiguration und Art der Kommunikation ähnelt dieser einem PDO, jedoch werden zusätzliche Eigenschaften definiert.
Zur Verwendung von CANopen Safety wird anstatt des CANopen Device das CANopen Device SIL2 im Gerätebaum eingehängt. Ein sicheres CANopen Device hat zusätzlich zu den normalen Konfigurationsseiten Safety-spezifische Seiten. In diesen können die SRDOs (sichere PDOs) konfiguriert werden. Neben den normalen unsicheren Geräteinstanzen, wird pro Safety Gerät (CANopen Device) eine zusätzliche Instanz mit Präfix „S_“ generiert. Diese bietet Safety-spezifische Diagnosemöglichkeiten.
Die Verwendung des CANopen Device SIL2 setzt ein SIL2 CODESYS Runtime mit einem speziell angepassten CAN-Minitreiber, sowie ein CODESYS SIL2 Plug-in voraus. Die benötigten Bibliotheken und Geräte sind in der Standardinstallation bereits enthalten.
Rekonfiguration CANopen Local Device (Slave)
Mit der Funktion „Rekonfiguration“ können Sie eine initial auf die Steuerung heruntergeladene CAN-Bus-Konfiguration zur Laufzeit der Anwendung dynamisch anpassen.
Mit dem Funktionsbaustein DED.Reconfigure, der bei aktivierter generischer Gerätediagnose (SPS-Einstellungen) verfügbar ist, können Sie folgende Aktionen zur Laufzeit ausführen:
Aktivieren/Deaktivieren einzelner Geräte
Für weitere Informationen siehe: Rekonfiguration CANbus
Verhalten des Buszyklus beim CANopen Device
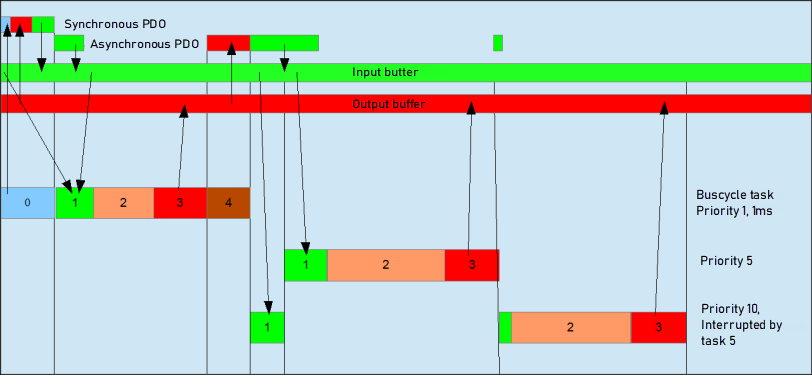
0: Send/Receive of synchronous PDOs
1: Empfangen von asynchronen PDOs
2: IEC-Task
3: Schreiben der Ausgänge in den Ausgangspuffer
4: Senden von asynchronen PDOs
Für weitere Informationen siehe: Taskkonfiguration