IoDrvEtherCAT.FrameAtTaskStart (PROP)¶
PROPERTY FrameAtTaskStart : BOOL
TRUE: The frame for the slave is transferred at the beginning of the task (before the IEC task), which ensures minimum jitter. This command is used to achieve jerk-free movements of servo drives. If this flag is set to TRUE, the frame of the output buffer is written in the next cycle (see diagram below).
Default: FALSE (TRUE when using CODESYS SoftMotion)
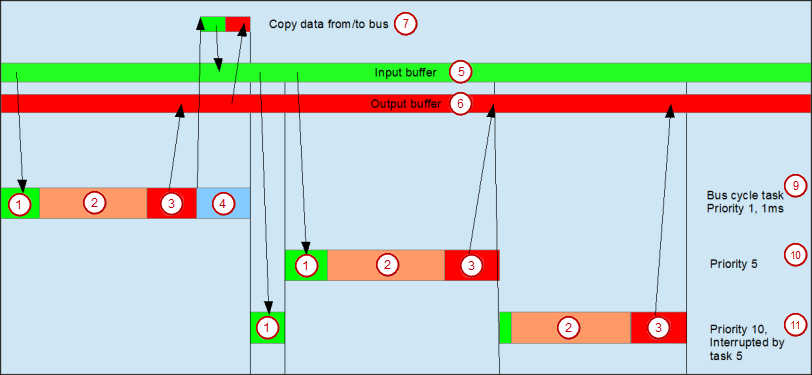
Timing with FrameAtTaskStart set to false:
Timing with FrameAtTaskStart set to true:
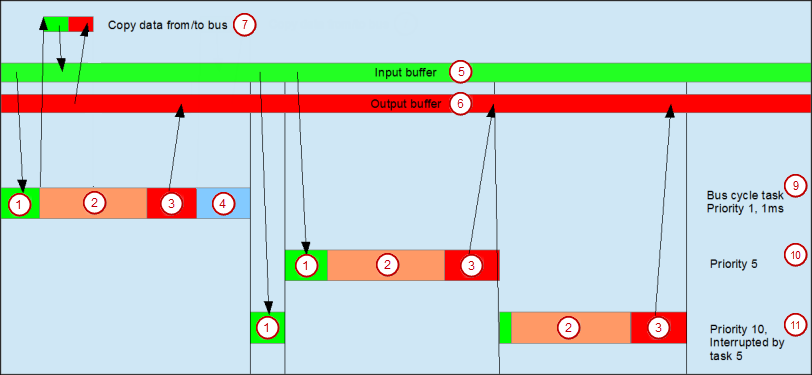
(1) Read inputs from input buffer
(2) IEC task
(3) Writing outputs to output buffer
(4) Bus cycle
(5) Input buffer
(6) Output buffer
(7) Copy data to/from bus
(9) Bus cycle task, priority 1, 1 ms
(10) Cyclic task, priority 5
(11) Cyclic task, priority 10, interrupted by task 5