的组成部分 CODESYS SoftMotion
CODESYS SoftMotion 是一个软件包,用作运动控制的开发和运行环境。概述如下:
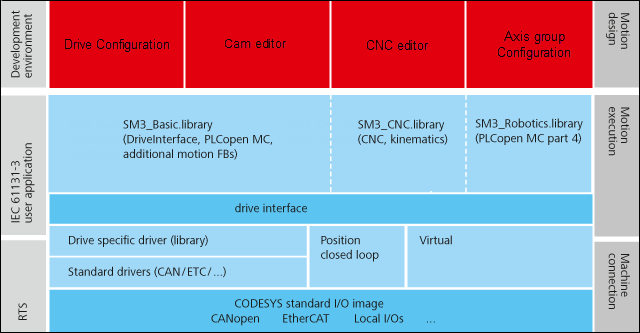
驱动配置:驱动配置提供了一个编辑器,您可以通过以下方式设置驱动硬件的结构和配置。 CODESYS 用户界面。此时,将创建一个 IEC 功能块的实例来表示驱动器。该功能块自动与驱动器通信,无需 IEC 程序员的额外工作。它负责传输更新的数据。
为了控制驱动器,IEC 程序可以通过 SoftMotion 图书馆。或者,您也可以为此开发自己的功能块。设置值(位置、速度、加速度等)由这些功能块循环写入。
注意: CODESYS SoftMotion Light 产品是标准安装的一部分 CODESYS.它提供了控制轴的能力。这样, CODESYS 仅定义目标位置并等待轴控制器的响应。轴控制器负责运动规划。多轴的协调运动 CODESYS 不可能。
凸轮编辑器:在凸轮编辑器中,您可以用图形或表格的方式描述凸轮。 CODESYS 由此生成描述凸轮的数据结构的全局实例。这将传递给适用的 POU 可以访问它的应用程序。
数控编辑器:在 CNC 编辑器中,您可以生成多维运动。您可以使用文本编辑器(根据 DIN 66025)或图形编辑器创建 CNC 路径。作为文本编辑器的替代方案,您还可以在简化的表格视图中工作。
轴组配置:轴组定义多个机械相关轴之间的关系,这些轴共同定位和定向空间中的工具或工具板。使用配置器,您可以选择和配置要使用的运动学。此外,您可以分配 SoftMotion 轴。
这
SM3_Basic图书馆是所有人的基本图书馆 SoftMotion 应用程序。具体来说,它包含以下内容:符合 PLCopen 标准的 PLCopen 功能块
通过这些功能块,您可以控制单轴运动或两轴(电动凸轮、电动驱动器)的主/从运动。
PLCopen 功能未涵盖的其他 FB
帮助功能:例如处理文件或错误消息
这
SM3_CNC库是基于SM3_Basic图书馆。除了用于运动学变换的功能块外,它还提供了生成、执行和显示 CNC 运动所需的所有 POU。它还提供了用于路径预处理和路径重建的功能块。这
SM3_Robotics库包含符合 PLCopen 第 4 部分的机器人功能块和附加功能块。包含的SM3_Transformations库包含支持的运动学变换。这 驱动接口 是一部分
SM3_Basic库并负责IEC程序和驱动器之间的通信。对于支持的驱动器, CODESYS SoftMotion 提供实现此驱动器接口的库。
提示
另请参阅应用示例的描述。