附加样条轴 A、B、C
G码字: A, B, C
函数: 使用 A, B,以及 C 来定义其他样条轴的目标位置。这些轴类似于 P, Q, U, V,以及 W。 P, Q, U,以及 V 是线性插值的, A, B,以及 C 使用三度多项式进行插值。
提示
使用
A,B,或C不包括使用附加轴U,V,以及W因为U,V,以及W定义梯度。斧头
A,B,或C可使用第 3、4 或 5 位进行选择wAxis的输入SMC_limitDynam或者wAddAxis的smc_checkforLimits。这个
smc_smoothPath,smc_smoothMerg,smc_smoothbspline,以及smc_recomputeABCSLOPES功能块自动确定附加轴的斜率。这意味着U,V,或W不是必需的。
例 39. 实施例1
G代码
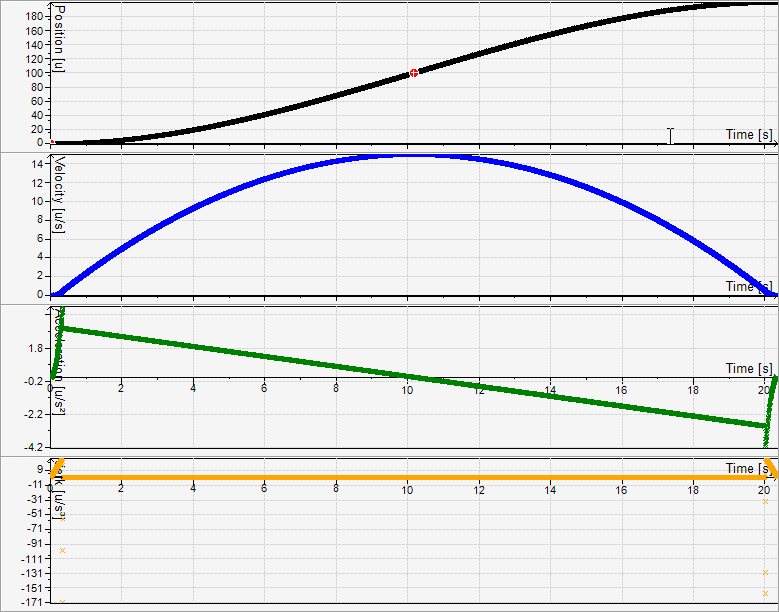
N10 G0 X0 A0 P0 F10 E30 E-30 N20 G1 X100 A100 P100
线性附加轴 P 线性插入到行进路径中。因此,它的时间曲线返回路径速度的曲线。
附加样条轴 A 作为多项式函数进行插值。
例 40. 实施例2
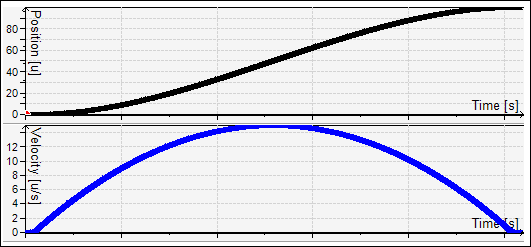
使用样条函数是必要的,尤其是在使用具有恒定切线过渡的路径时,插值器不必将其减速到速度 0:
G代码
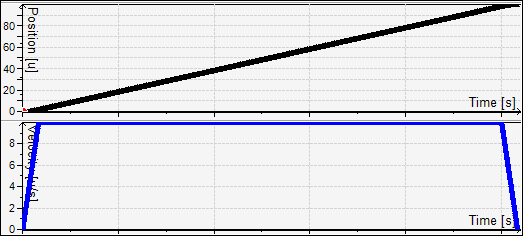
N10 G0 X0 A0 P0 F10 E30 E-30 N20 G1 X50 A40 P40 N30 G1 X100 A100 P100
在线性情况下,您会看到速度跳跃,因为 40 个单位的附加轴在第一部分中的 50 个路径单位上运行,而附加轴的 60 个单位在第二个部分中的 50 个路径单位上运行。因为路径速度仅在路径笛卡尔空间之后定义 (XYZ),所以 X 中的恒定速度会导致 P 中的速度跳跃:
样条轴显示以下轮廓:
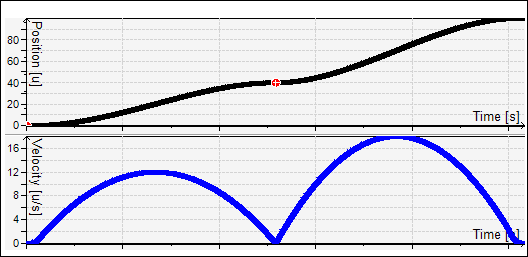
例 41. 实施例3
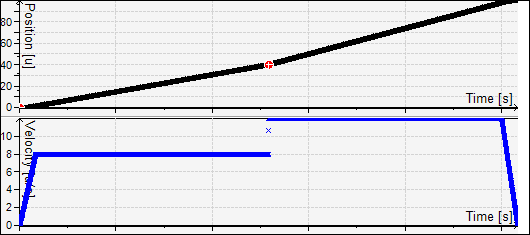
A、B、C 轴在终点位置的斜率可由 U、V、W 字定义。坡度的单位是空间中每个路径单位的附加轴的路径单位。
G代码
N10 G0 X0 A0 F10 E30 E-30 N20 G1 X100 A100 U1.5 N30 G1 X200 A200 U0
适用用户编程的 A 轴斜率 (U=2),因为该程序包含之间的连续过渡 N20 和 N30。因此,对于 X=100,A 轴位置的增长速度是路径长度的两倍