应用示例:双手控制
双手控制(类别 4,PL e)用作编程示例 CODESYS Safety for EtherCAT Safety Module 并以 FBD 实现形式进行说明。
每个双手按钮均由输入模块(例如:EL1904)安全输入上的常闭和常开触点组合而成。输入测试处于活动状态,信号也会被检查是否存在差异(200 毫秒)。此外,两个按钮的同步操作以 500 毫秒的监控时间激活。
反馈回路通过安全输入读取。接触器 K1 和 K2 并联连接到安全输出。此电路的电流测量和输出测试处于活动状态。
图 21. 带 EDM 的双手控制布局
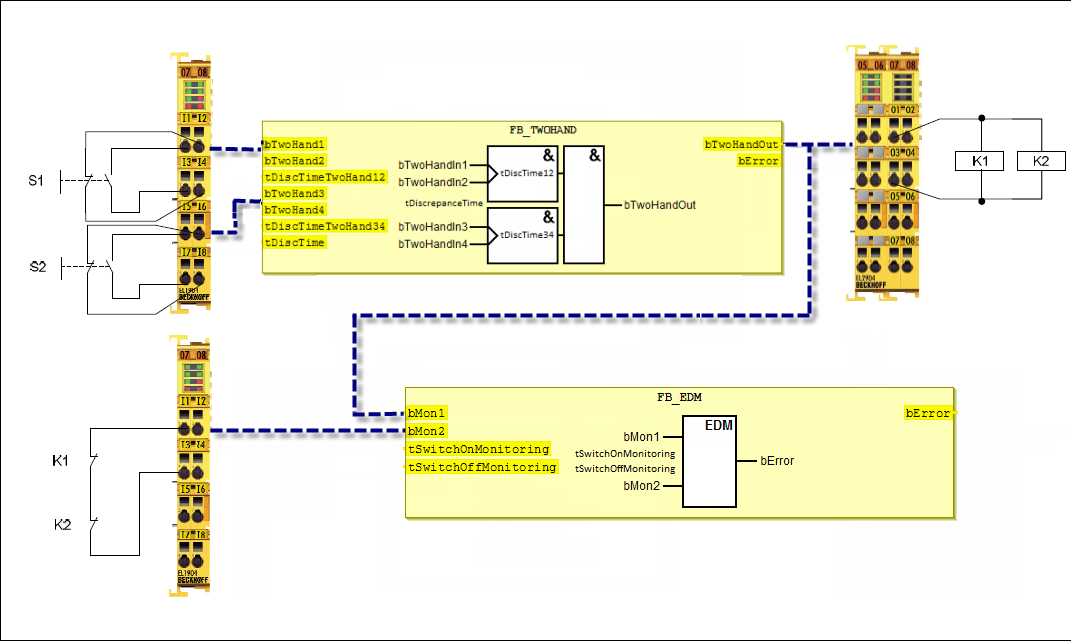
图 22. 编程示例的实现:使用 EDM 进行双手控制
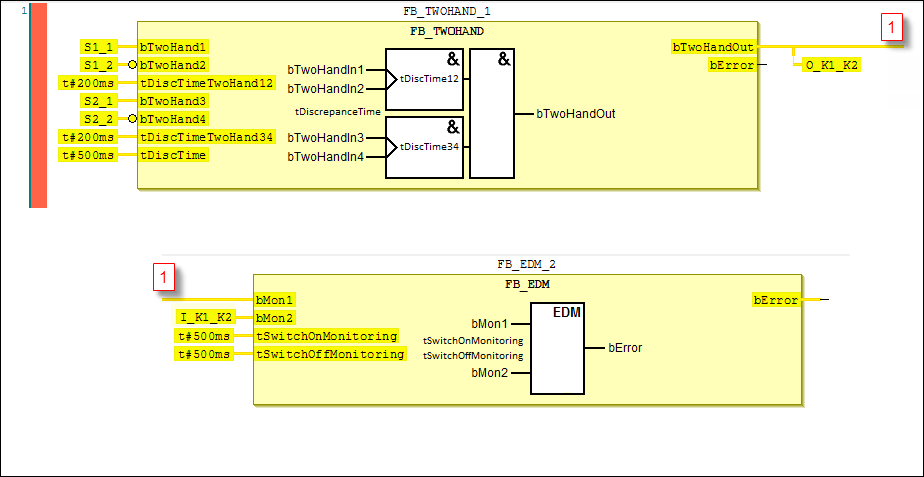
表 1. 输入
姓名 | 数据类型 | 描述 |
|---|---|---|
|
| 双手按钮1:NO(常开) |
|
| 双手按钮1:NC(常闭) |
|
| 双手按钮2:NO(常开) |
|
| 双手按钮2:NC(常闭) |
|
| 联系方式 |
表 2. 输出
姓名 | 数据类型 | 描述 |
|---|---|---|
|
| 接触器的动作 |
|
| 错误标志 |
|
| 错误标志 |
表 3. 功能块参数
功能块 | 输入 | 常数值 | 描述 |
|---|---|---|---|
|
|
| 常闭触点与常开触点之间的差异时间 |
|
|
| 常闭触点与常开触点之间的差异时间 |
|
|
| 之间的差异时间 |
|
|
| 开启延迟 |
|
|
| 关机延迟 |