のコンポーネント CODESYS SoftMotion
CODESYS SoftMotion は、モーションコントロールの開発およびランタイム環境として使用されるソフトウェアパッケージです。それは次のように概説されています:
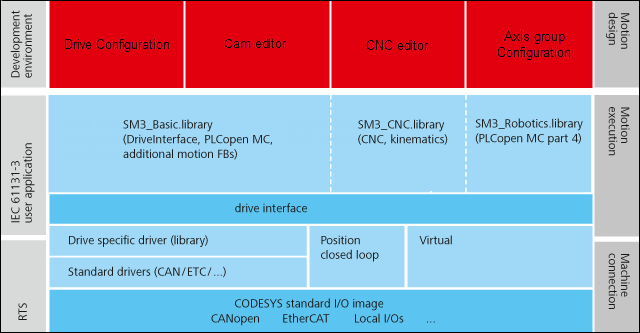
ドライブ構成:ドライブ構成は、ドライブハードウェアの構造と構成を設定するためのエディターを提供します。 CODESYS ユーザーインターフェース。このとき、ドライブを表すIEC機能ブロックのインスタンスが作成されます。この機能ブロックは、IECプログラマーによる追加の作業なしで、ドライブと自動的に通信します。更新されたデータを送信する責任があります。
ドライブを制御するために、IECプログラムは、の機能ブロックを使用してドライブをアドレス指定できます。 SoftMotion ライブラリ。または、この目的のために独自の機能ブロックを開発することもできます。設定値(位置、速度、加速度など)は、これらの機能ブロックによって周期的に書き込まれます。
注: CODESYS SoftMotion Light 製品はの標準インストールの一部です CODESYS。軸を指令する機能を提供します。この上、 CODESYS 目標位置のみを定義し、軸コントローラからの応答を待ちます。軸コントローラは、動作計画を担当します。による複数の軸の協調運動 CODESYS 不可能である。
カムエディタ:カムエディタでは、カムをグラフィカルに、またはテーブルを使用して記述することができます。 CODESYS これから、カムを記述するデータ構造のグローバルインスタンスを生成します。これは、該当するPOUがアクセスできるアプリケーションに渡されます。
CNCエディター:CNCエディタでは、多次元の動きを生成できます。 CNCパスは、テキストエディタ(DIN 66025に準拠)またはグラフィックエディタを使用して作成できます。テキストエディタの代わりに、簡略化された表形式のビューで作業することもできます。
軸グループ構成:軸グループは、空間内のツールまたはツールプレートを集合的に配置および方向付ける複数の機械的に依存する軸間の関係を定義します。 Configuratorを使用して、使用するキネマティクスを選択して構成します。さらに、SoftMotion軸を割り当てることができます。
The
SM3_Basicライブラリはすべての人のための基本的なライブラリです SoftMotion アプリケーション。具体的には、次のものが含まれます。PLCopen規格に準拠したPLCopenファンクションブロック
これらの機能ブロックを使用すると、2軸(電気カム、電気ドライブ)の1軸移動またはマスター/スレーブ移動を制御できます。
PLCopen機能でカバーされていない追加のFB
ヘルプ機能:たとえば、ファイルの処理やエラーメッセージ用
The
SM3_CNCライブラリはに基づいていますSM3_Basic図書館。キネマティック変換の機能ブロックに加えて、CNCモーションの生成、実行、表示に必要なすべてのPOUを提供します。また、パスの前処理とパスの再構築のための機能ブロックも提供します。The
SM3_Roboticsライブラリには、ロボット工学用のPLCopen Part4に準拠した機能ブロックと追加の機能ブロックが含まれています。含まれていますSM3_Transformationsライブラリには、サポートされているキネマティック変換が含まれています。The ドライブインターフェース の一部です
SM3_Basicライブラリであり、IECプログラムとドライブ間の通信を担当します。サポートされているドライブについては、 CODESYS SoftMotion このドライブインターフェイスを実装するライブラリを提供します。
ヒント
アプリケーション例の説明も参照してください。