追加のスプライン軸A、B、C
Gコードワード: A、 B、 C
ファンクション: 使用 A、 B、および C 追加のスプライン軸のターゲット位置を定義します。これらの軸は以下と似ています。 P、 Q、 U、 V、および W。 P、 Q、 U、および V 直線的に補間され、 A、 B、および C 3 次多項式で補間されます。
ヒント
を使う
A、B、またはC追加軸の使用は除外されます。U、V、およびWなぜならU、V、およびWグラデーションを定義します。座標軸
A、B、またはCのビット 3、4、または 5 で選択できます。wAxisの入力SMC_リミット・ダイナミクスまたはwAddAxisのSMC_リミットをチェック。ザの
SMC_SmoothPath、SMC_SmoothMerge、SMC_スムースBスプライン、およびSMC_ABC スロープを再計算ファンクションブロックは、追加する軸の傾きを自動的に決定します。つまり、以下の定義はU、V、またはW必要ありません。
Gコード
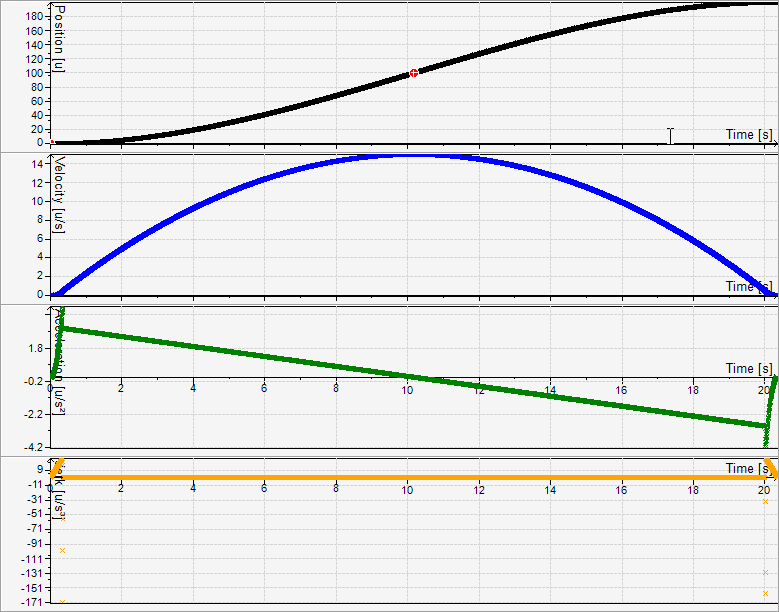
N10 G0 X0 A0 P0 F10 E30 E-30 N20 G1 X100 A100 P100
線形追加軸Pは、移動経路に対して線形補間されます。したがって、その時間プロファイルは、パス速度の時間プロファイルを返します。
追加のスプライン軸Aは、多項式関数として補間されます。
スプライン関数を使用する必要があります。特に、接線遷移が一定のパスを使用する場合は、補間関数を速度0まで減速する必要はありません。
Gコード
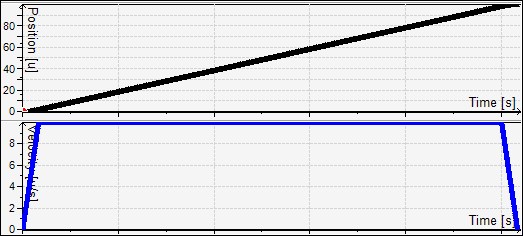
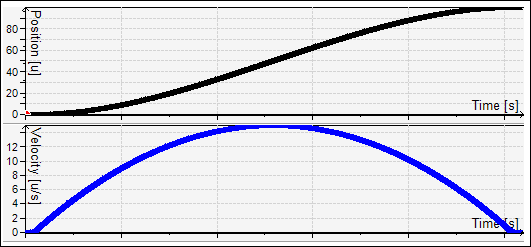
N10 G0 X0 A0 P0 F10 E30 E-30 N20 G1 X50 A40 P40 N30 G1 X100 A100 P100
線形の場合、最初の部分では40単位の追加軸が50パス単位で移動し、2番目の部分では60単位の追加軸が50パス単位で移動するため、速度が急上昇します。パス速度はパスデカルト空間の後にのみ(XYZ)を定義するため、Xの一定速度により、Pの速度ジャンプが発生します。
スプライン軸には、次のプロファイルが表示されます。
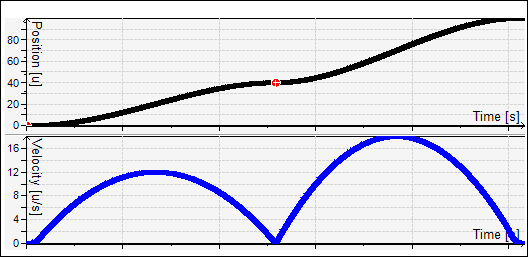
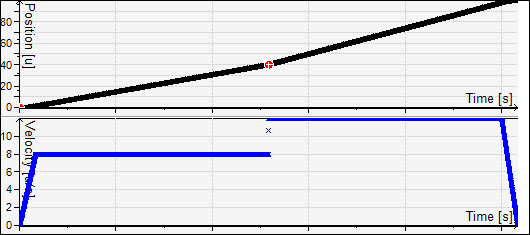
終了位置での軸A、B、およびCの勾配は、U、V、およびWワードで定義できます。勾配の単位は、空間内のパス単位ごとの追加軸のパス単位です。
Gコード
N10 G0 X0 A0 F10 E30 E-30 N20 G1 X100 A100 U1.5 N30 G1 X200 A200 U0
このプログラムにはA軸間の連続的な遷移が含まれているため、ユーザーがプログラムしたA軸の勾配 (U=2) が適用されます N20 そして N30。したがって、X=100 の場合、A 軸の位置はパスの長さの 2 倍の速さで増加します