冗長性
冗長制御システム
冗長PLCでPLCを保護することで、制御システムの信頼性を高めることができます。冗長PLCは実行時にアプリケーションの実行を引き継ぐことができます。これにより、たとえばシステム障害を防ぐことができます。
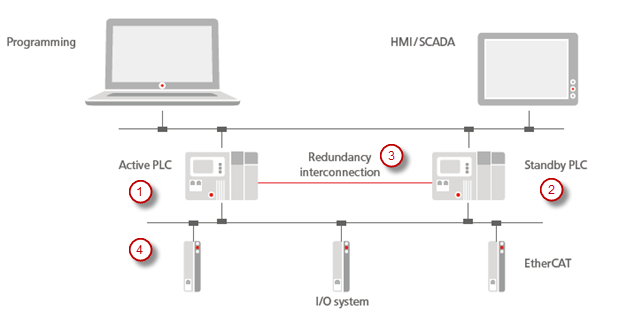
この図は、冗長制御システムの構造を示しています。このアプリケーションは 2 つの PLC で同時に実行されます。1 つはアクティブ PLC (1) で、もう 1 つはスタンバイモードの PLC (2) です。スタンバイモードのPLCは、接続されたフィールドバスシステム (図ではEtherCAT) の入力を読み取り、冗長リンク (3) を介してアクティブなPLCと同期します。これにより、障害発生時にはスタンバイPLCがすぐにアクティブになり、中断することなくフィールドバス (4) の制御を引き継ぐことができます
冗長相互接続 (3) は TCP と UDP で実装されていますが、ベンダー固有のコンポーネントに置き換えることもできます。
さらに、冗長制御システムが次のように実行されるときに、視覚化を使用できます。 CODESYS WebVisu ブラウザで。視覚化クライアントは、切り替えが発生した場合でもほぼシームレスに実行され続けます。
機能に関する基本情報
アプリケーションプログラマーは、アプリケーションを最初のPLCにダウンロードし、ブートアプリケーションを作成します。
2 台目の PLC は起動時に同期され、起動アプリケーションを受信します。
ブートアプリケーションがロードされて初期化され、最初のタスクサイクルを実行する準備が整いました。登録されたメモリ領域のすべてのデータ (すべての IEC データ) が 2 番目の PLC に転送されます。つまり、冗長性が有効で、アプリケーションタスクが両方の PLC で同期して実行されるということです。タスク実行の同期は、冗長インターコネクションを介して送信されるメッセージによって実装されます。メッセージは IEC タスクの実行前と実行後に送信されます
推奨のアクティブ PLC はありません。動作モードは起動シーケンスによって決まります。最初に起動した PLC は、冗長インターコネクションを介して対応するメッセージを送信します。応答がない場合、ブートアプリケーションが読み込まれ、スタンドアロンモードで動作します
アクティブPLCからのメッセージが設定された時間内にスタンバイPLCで受信されない場合、スタンバイPLCはアクティブPLCが動作していないと見なします。その結果、スタンバイ PLC はスタンドアロンモードに切り替わり、フィールドバス I/O を制御するようになります。設定した時間内にスタンバイ PLC からメッセージが受信されない場合も、アクティブ PLC はスタンドアロンモードに切り替わります
最初のPLCを交換して再起動すると、上記のように現在スタンドアロンモードになっている他のPLCと同期し、スタンバイモードになります。
スタンバイPLCはシミュレーションモードに切り替えることができます。その場合、リダンダンシーは有効化されませんが、フィールドバスはスタンバイモードの場合と同様に無効のままになります。アクティブな PLC はスタンドアロンモードに切り替わります。シミュレーションモードは PLC を再同期または再起動することで終了できます。その後、同期中または再起動中にエラーが発生しない限り、PLC はスタンバイモードに戻ります
ブートアプリケーションまたは登録されたメモリ領域の更新中、または冗長サイクル中にエラーが発生した場合、PLCはエラーモードに切り替わります。その後、再同期または再起動する必要があります
注記
 "Redundancy using the example of two Raspberry Pis with CODESYS Control for Raspberry Pi SL"
"Redundancy using the example of two Raspberry Pis with CODESYS Control for Raspberry Pi SL"
このビデオは、この機能の概要を説明することを目的としています。の機能の範囲 CODESYS Redundancy ご覧のように、現在の機能範囲から逸脱する可能性があります。
