全般
CANopenマネージャーは CAN バスマスターであり、CAN バス ノードの下の CAN バス構成に挿入されます。
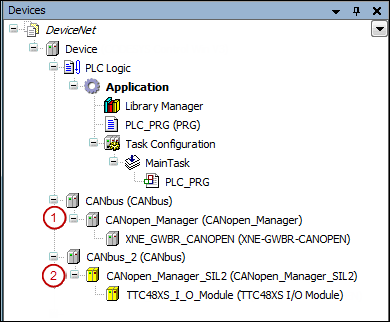
CODESYS以下のCANopenマスターを提供します。
CANopenマネージャー (1)
CANopenマネージャーSIL2 (2)
CANopen Manager SoftMotion: SoftMotion コントローラの下に挿入できます。CANbus 経由のモーション操作用に適応されたプリセットが含まれています。
でCODESYS CANopenリモートデバイスは、プロジェクトのデバイスツリーにおいてCANopenマネージャーの下に挿入するスレーブデバイスです。モジュール型スレーブと非モジュール型スレーブに区別されます。
モジュラースレーブ : CANopenモジュール(サブモジュール)をモジュラースレーブの下に挿入することができます。これらのモジュールは、 I/Oマッピングタブで入力と出力を「マッピング」します。モジュラースレーブは固定のI/Oを持つこともできます。これらのデバイスはI/Oマッピングタブ。モジュラーデバイスはPDOマッピングを自動的に構成する標準的なアプリケーションに推奨されるオプションです。このオプションはCANopenリモートデバイスダイアログ、全般タブ。
非モジュールスレーブ : 非モジュラーデバイスの下に追加のモジュールを挿入することはできません。これらのデバイスの入力と出力は、 I/Oマッピングダイアログ。ここでは自動マッピングはできません。