Generale
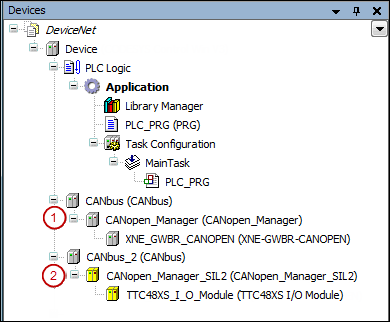
Il CANopen Manager è il master del bus CAN e viene inserito nella configurazione del bus CAN sotto il nodo del bus CAN.
CODESYS fornisce i seguenti Master CANopen :
Gestore CANopen (1)
Gestore CANopen SIL2 (2)
CANopen Manager SoftMotion: può essere inserito sotto un controller SoftMotion; contiene preset adattati per il funzionamento del movimento tramite CANbus.
In CODESYS Un dispositivo remoto CANopen è un dispositivo slave che si inserisce sotto un gestore CANopen nell'albero dei dispositivi di un progetto. Si distingue tra slave modulari e non modulari:
Schiavi modulari: È possibile inserire moduli CANopen (sottomoduli) sotto uno slave modulare. Questi moduli forniscono un Mappatura I/O scheda per "mappare" i loro ingressi e uscite. Gli slave modulari possono anche avere I/O fissi. Quindi questi dispositivi forniscono anche Mappatura I/O scheda. I dispositivi modulari forniscono la Configurare automaticamente la mappatura PDO opzione, che consigliamo per le applicazioni standard. Questa opzione è disponibile nella Dispositivo remoto CANopen dialogo, sul Generale scheda.
Slave non modulari: Non è possibile inserire moduli aggiuntivi sotto un dispositivo non modulare. Gli ingressi e le uscite di questi dispositivi sono "mappati" nel Mappatura I/O dialogo. La mappatura automatica non è possibile qui.