Redondance
Système de contrôle redondant
Vous pouvez augmenter la fiabilité de votre système de contrôle en protégeant votre automate programmable à l'aide d'un automate redondant. Le PLC redondant est capable de prendre en charge l'exécution de l'application au moment de l'exécution. Cela permet d'éviter les défaillances du système, par exemple.
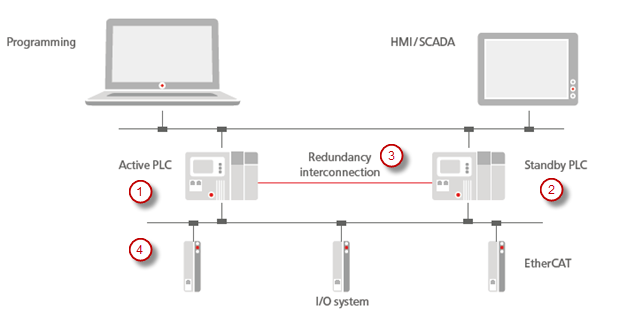
L'illustration montre la structure d'un système de commande redondant. L'application s'exécute simultanément sur deux automates programmables : un automate actif (1) et le second automate en mode veille (2). L'automate en mode veille lit les entrées du système de bus de terrain connecté (EtherCAT sur l'illustration) et se synchronise avec l'automate actif via la liaison de redondance (3). Cela permet au PLC de secours de devenir immédiatement actif en cas de dysfonctionnement et de prendre le contrôle des bus de terrain (4) sans interruption
L'interconnexion de redondance (3) est mise en œuvre avec TCP et UDP, mais peut être remplacée par un composant spécifique au fournisseur.
De plus, vous pouvez utiliser des visualisations avec le système de contrôle redondant lorsqu'elles fonctionneront comme CODESYS WebVisu dans un navigateur. Les clients de visualisation continueront de fonctionner de manière presque transparente en cas de basculement.
Informations de base sur les fonctionnalités
Le programmeur de l'application télécharge l'application sur le premier automate et crée une application de démarrage.
Le second automate est synchronisé au démarrage et reçoit l'application de démarrage.
L'application de démarrage est chargée et initialisée, puis elle est prête à exécuter le premier cycle de tâches. Toutes les données provenant des zones de mémoire enregistrées (toutes les données IEC) sont transférées vers le second automate. Cela signifie que la redondance est effective et que la tâche de l'application est exécutée de manière synchrone sur les deux automates. La synchronisation de l'exécution des tâches est mise en œuvre par des messages envoyés via l'interconnexion de redondance. Les messages sont envoyés avant et après l'exécution de la tâche IEC.
n'existe pas de PLC actif préféré. Le mode de fonctionnement est déterminé par la séquence de démarrage. Le premier PLC à démarrer envoie un message correspondant via l'interconnexion de redondance. S'il ne reçoit pas de réponse, il charge l'application de démarrage et s'exécute en mode autonome.
Si aucun message provenant de l'automate actif n'est reçu par l'automate de secours dans le délai configuré, l'automate de secours suppose que l'automate actif ne fonctionne plus. Par conséquent, l'automate de secours passe en mode autonome et contrôle désormais les E/S du bus de terrain. L'API actif passe également en mode autonome s'il n'a pas reçu de message de l'API de secours dans le délai configuré.
Si le premier automate est remplacé et redémarré, il se synchronise avec l'autre API actuellement en mode autonome comme décrit ci-dessus et passe donc en mode veille.
Un automate de secours peut passer en mode simulation. La redondance n'est alors pas activée, mais le bus de terrain reste désactivé comme en mode veille. L'automate actif passe en mode autonome. Le mode simulation peut être terminé en resynchronisant ou en redémarrant l'automate. L'automate repasse ensuite en mode veille, sauf si des erreurs se produisent lors de la synchronisation ou du redémarrage.
Si des erreurs se produisent lors de la mise à jour de l'application de démarrage ou des zones de mémoire enregistrées, ou pendant le cycle de redondance, l'automate passe en mode erreur. Il doit ensuite être resynchronisé
Avis
 "Redundancy using the example of two Raspberry Pis with CODESYS Control for Raspberry Pi SL"
"Redundancy using the example of two Raspberry Pis with CODESYS Control for Raspberry Pi SL"
La vidéo a pour but de vous donner un aperçu général de cette fonctionnalité. L'éventail des fonctions de CODESYS Redundancy comme on peut le voir, il peut y avoir des différences par rapport à la gamme actuelle de fonctions.
 Exemple de projet pour des automates programmables redondants
Exemple de projet pour des automates programmables redondants