Général
Le gestionnaire CANopen est le maître du bus CAN et est inséré dans la configuration du bus CAN sous le nœud du bus CAN.
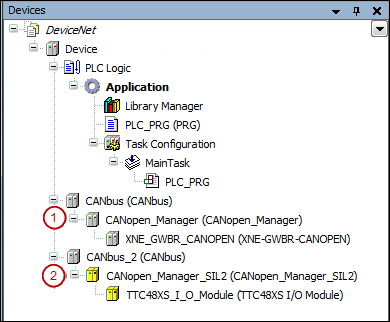
CODESYS fournit les maîtres CANopen suivants :
Gestionnaire CANopen (1)
Gestionnaire CANopen SIL2 (2)
Gestionnaire CANopen SoftMotion : Peut être inséré sous un contrôleur SoftMotion ; contient des préréglages adaptés pour le fonctionnement du mouvement via CANbus.
Dans CODESYS Un périphérique distant CANopen est un périphérique esclave que vous insérez sous un gestionnaire CANopen dans l'arborescence des périphériques d'un projet. On distingue les périphériques esclaves modulaires et non modulaires.
Esclaves modulaires Vous pouvez insérer des modules CANopen (sous-modules) sous un esclave modulaire. Ces modules fournissent un Mappage des E/S L'onglet permet de « mapper » leurs entrées et sorties. Les esclaves modulaires peuvent également avoir des E/S fixes. Ces appareils fournissent alors également Mappage des E/S onglet. Les dispositifs modulaires offrent le Configurer automatiquement le mappage PDO cette option, que nous recommandons pour les applications standard, se trouve dans le Dispositif distant CANopen dialogue, sur le Général languette.
Esclaves non modulaires Vous ne pouvez pas insérer de modules supplémentaires sous un périphérique non modulaire. Les entrées et sorties de ces périphériques sont « mappées » dans le Mappage des E/S dialogue. Le mappage automatique n'est pas possible ici.