SMC_TRAFOF_GantryT2 (FB)¶
FUNCTION_BLOCK SMC_TRAFOF_GantryT2
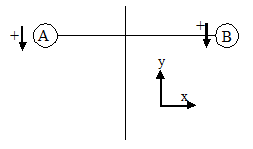
Forward transformations for T-gantry systems with stationary drives.
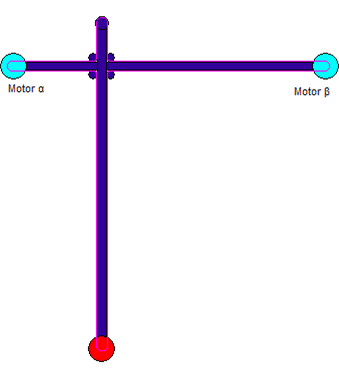
Drive configuration:
Note
For detailed information on transformations see overview to SM_Trafo_POUs.
- InOut:
Scope
Name
Type
Comment
Input
dOffsetXLREALOffset for x-axis
dOffsetYLREALOffset for y-axis
minXLREALMinimum x-position limiting move range (for visualization purpose)
maxXLREALMaximum x-position limiting move range (for visualization purpose)
minYLREALMinimum y-position limiting move range (for visualization purpose)
maxYLREALMaximum y position limiting move range (for visualization purpose)
Inout
DriveAAXIS_REF_SM3Reference to axis A
DriveBAXIS_REF_SM3Reference to axis B
Output
dxLREALX-position
dyLREALY-position
dnxLREALNormed x-position (with value in [0,1]) (for visualization purpose)
dnyLREALNormed y-position (with value in [0,1]) (for visualization purpose)
ratioLREALRatio of x-interval to y-interval (for visualization purpose)
dnOffsetXLREALNormed x-offset (with value in [0,1]) (for visualization purpose)
dnOffsetYLREALNormed y-offset (with value in [0,1]) (for visualization purpose)