MC_MoveAbsolute (FB)¶
FUNCTION_BLOCK MC_MoveAbsolute
This function block causes the axis to be moved to an absolute position and uses the values for Velocity, Deceleration, Acceleration and Jerk.
If no further actions are pending, the execution ends with velocity 0. (See: standstill)
- Example
- Use of
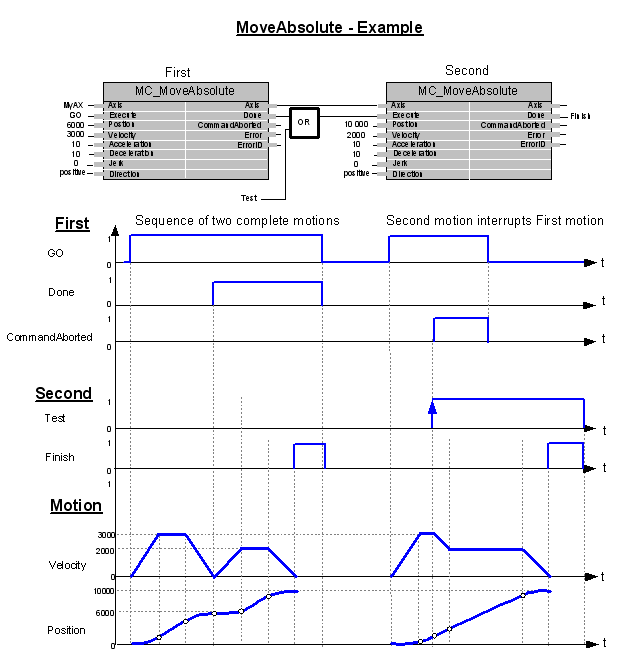
MC_MoveAbsoluteThe following illustration shows two possibilities for combining two instances (FirstandSecond) of the typeMC_MoveAbsolute. In the left-hand part of the diagram theSecondinstance is called after theFirstinstance.IfFirsthas reached the specified position of 6000 and the inputVelocityis 0, then theDoneoutput will cause theSecondinstance to move the axis to the position 10000. In the right-hand part of the diagram, the execution is started bySecondwhileFirstis still operating.The motion caused byFirstis interrupted and aborted by theTestsignal which is transmitted during the constant velocity phase ofFirst.Secondsteers directly to position 10000, even though position 6000 has not yet been reached.
- InOut:
Scope
Name
Type
Initial
Comment
Inout
AxisInput
ExecuteBOOLTRUE: Starts execution.PositionLREALTarget position of the motion in technical units [u], can be negative or positive.
VelocityLREALMaximum velocity in techincal units per second [u/s].
Is always positive.
Is not necessarily reached.
AccelerationLREALAcceleration in [u/s²].
Is always positive.
Increasing motor energy
DecelerationLREALDeceleration in [u/s²].
Is always positive.
Decreasing motor energy
JerkLREALMaximum magnitude of jerk in [u/s³]
Directionshortest
The direction is used for modulo axes to determine the modulo-period in which the target position is reached. For finite axes, the input is ignored.
BufferModeMC_BUFFER_MODEDefines the chronological sequence of the FB relative to the previous block. If the function block is Busy, then only BufferMode=Aborting is allowed.
Output
DoneBOOLTRUE: End position has been reached.BusyBOOLTRUE: Function block is in operation.If no further actions are pending, the execution ends with velocity 0.
ActiveBOOLIndicates that the FB has control on the axis
CommandAbortedBOOLTRUE: The execution is interrupted by an other function block.ErrorBOOLTRUE: Error has occurred.ErrorIDSMC_ERRORError identification