Controlar el movimiento de ejes individuales
Ver el PLCopenSingle.project proyecto de ejemplo en el directorio de instalación de CODESYS por debajo ..\CODESYS SoftMotion\Examples.
Este ejemplo demuestra cómo controlar un convertidor mediante bloques de función estandarizados PLCopen.
Inserte una unidad virtual llamada
Driveen el árbol de dispositivos a continuación Piscina SoftMotion General Axis.Crear un MOTION_PRG programa en ST.
PROGRAM MOTION_PRG VAR iStatus: INT; Power: MC_Power; MoveAbsolute: MC_MoveAbsolute; p:REAL:=100; END_VAR CASE iStatus OF // initialization of the axis 0: Power(Enable:=TRUE, bRegulatorOn:=TRUE, bDriveStart:=TRUE, Axis:=Drive); IF Power.Status THEN iStatus := iStatus + 1; END_IF // Move the axis to position p by use of the MC_MoveAbsolute function block 1: MoveAbsolute(Execute:=TRUE, Position:= p, Velocity:=100, Acceleration:=100, Deceleration:=100, Axis:=Drive); IF MoveAbsolute.Done THEN MoveAbsolute(Execute:=FALSE, Axis:=Drive); iStatus := iStatus + 1; END_IF // Move the axis back to position 0 by use of the MC_MoveAbsolute function block: 2: MoveAbsolute(Execute:=TRUE, Position:= 0, Velocity:=100, Acceleration:=100, Deceleration:=100, Axis:=Drive); IF MoveAbsolute.Done THEN MoveAbsolute(Execute:=FALSE, Axis:=Drive); iStatus := 1; END_IFAgregue la llamada del programa MOTION_PRG a la tarea Tarea principal.
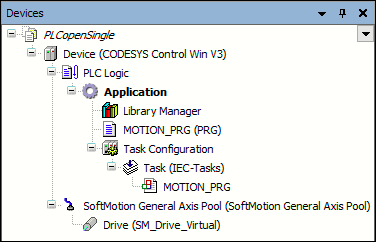
Árbol de dispositivos:
Descargue el proyecto al controlador e inícielo.
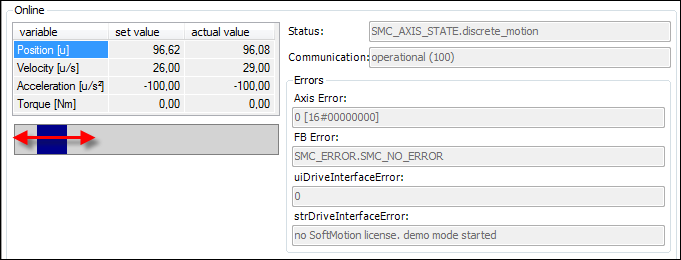
Abre el Conducir eje virtual en el editor.
En el En línea parte de General pestaña, verá el movimiento del eje.