Componentes de CODESYS SoftMotion
CODESYS SoftMotion es un paquete de software que se utiliza como entorno de desarrollo y tiempo de ejecución para el control de movimiento. Se describe a continuación:
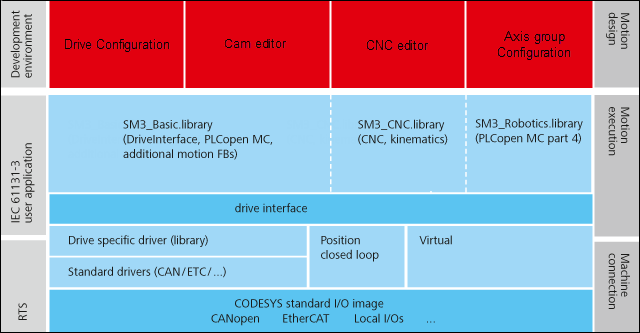
Configuración de la unidad: La configuración de la unidad proporciona un editor para que establezca la estructura y la configuración del hardware de la unidad mediante el CODESYS interfaz de usuario. En este momento, se crea una instancia de un bloque de funciones IEC para representar el variador. Este bloque de funciones se comunica automáticamente con los variadores sin esfuerzo adicional por parte del programador IEC. Es responsable de transmitir los datos actualizados.
Para controlar los accionamientos, el programa IEC puede direccionar un accionamiento mediante los bloques de función del SoftMotion bibliotecas Alternativamente, también podría desarrollar sus propios bloques de funciones para este propósito. Los valores establecidos (para posición, velocidad, aceleración, etc.) son escritos cíclicamente por estos bloques de función.
Nota la CODESYS SoftMotion Light producto es parte de la instalación estándar de CODESYS. Proporciona la capacidad de comandar los ejes. De este modo, CODESYS define solo la posición de destino y espera la respuesta del controlador de eje. El controlador de ejes es responsable de la planificación del movimiento. Un movimiento coordinado de múltiples ejes por CODESYS no es posible.
editor de cámara: En el editor de levas, puede describir una leva gráficamente o mediante tablas. CODESYS genera a partir de esto una instancia global de una estructura de datos que describe la leva. Esto se pasa a la aplicación donde las POU correspondientes pueden acceder a él.
editor CNC: En el editor CNC, puede generar movimientos multidimensionales. Puede crear la ruta CNC con un editor de texto (según DIN 66025) o con un editor gráfico. Como alternativa al editor de texto, también puede trabajar en una vista tabular simplificada.
Configuración del grupo de ejes: Un grupo de ejes define las relaciones entre múltiples ejes dependientes mecánicamente que posicionan y orientan colectivamente una herramienta o placa de herramientas en el espacio. Con el configurador se selecciona y configura la cinemática a utilizar. Además, puede asignar los ejes de SoftMotion.
El
SM3_Basicbiblioteca es una biblioteca básica para todos SoftMotion aplicaciones En concreto, contiene lo siguiente:Bloques de función PLCopen según el estándar PLCopen
Con estos bloques de función, puede controlar los movimientos de un eje o los movimientos maestro / esclavo de dos ejes (leva eléctrica, accionamientos eléctricos).
FB adicionales que no están cubiertos por las funcionalidades de PLCopen
Funciones de ayuda: por ejemplo, para el manejo de archivos o para mensajes de error
El
SM3_CNCbiblioteca se basa en laSM3_BasicBiblioteca. Además de los bloques de funciones para transformaciones cinemáticas, proporciona todas las POU necesarias para generar, ejecutar y mostrar el movimiento CNC. También proporciona bloques de funciones para el preprocesamiento y la reconstrucción de rutas.El
SM3_RoboticsLa biblioteca contiene bloques de funciones según PLCopen Parte 4 para robótica y bloques de funciones adicionales. el incluidoSM3_Transformationsbiblioteca contiene las transformaciones cinemáticas admitidas.El interfaz de la unidad es parte del
SM3_Basicbiblioteca y es responsable de la comunicación entre el programa IEC y los variadores. Para las unidades admitidas, CODESYS SoftMotion proporciona bibliotecas que implementan esta interfaz de unidad.
Sugerencia
Consulte también las descripciones de los ejemplos de aplicación.