Ejes spline adicionales A, B, C
Palabra de código G: A, B, C
Función: Uso A, B, y C para definir las posiciones objetivo de los ejes estriados adicionales. Estos ejes son similares a P, Q, U, V, y W. P, Q, U, y V se interpolan linealmente, A, B, y C se interpolan con un polinomio de tercer grado.
Sugerencia
Uso
A,B, oCexcluye el uso de los ejes adicionalesU,V, yWporqueU,V, yWdefine el gradiente.Los ejes
A,B, oCse puede seleccionar con los bits 3, 4 o 5 enwAxisentrada deSMC_LimitDynamicsowAddAxisdeSMC_CheckForLimits.El
SMC_SmoothPath,SMC_SmoothMerge,SMC_SmoothBSpline, ySMC_Recompute ABC Slopesbloques de funciones determinan automáticamente la pendiente de los ejes adicionales. Esto significa que la definición deU,V, oWno es necesario.
Código G
N10 G0 X0 A0 P0 F10 E30 E-30 N20 G1 X100 A100 P100
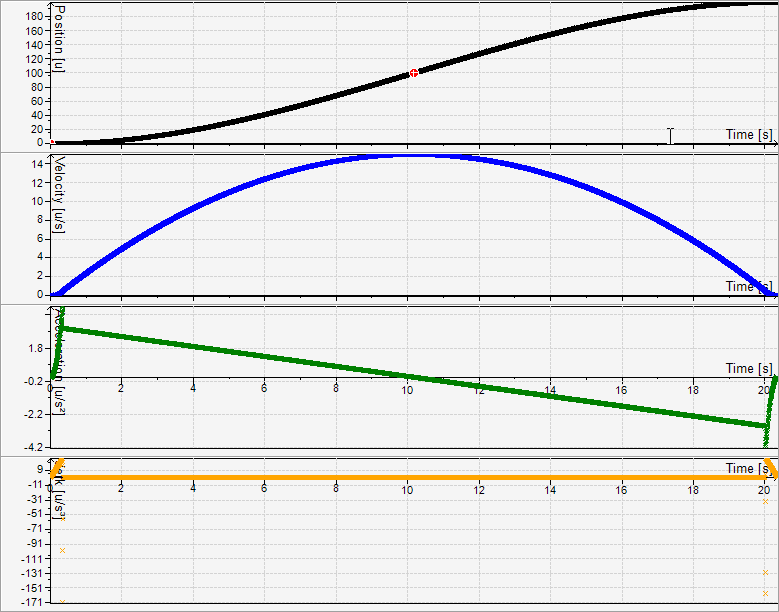
El eje adicional lineal P se interpola linealmente a la trayectoria recorrida. En consecuencia, su perfil de tiempo devuelve el de la velocidad de la trayectoria.
El eje spline adicional A se interpola como una función polinomial.
El uso de la función spline es necesario, especialmente si se usa una ruta con transiciones tangentes constantes, que el interpolador no tiene que desacelerar hasta la velocidad 0:
Código G
N10 G0 X0 A0 P0 F10 E30 E-30 N20 G1 X50 A40 P40 N30 G1 X100 A100 P100
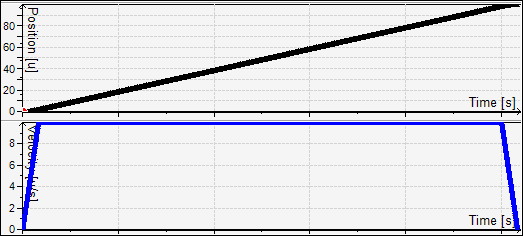
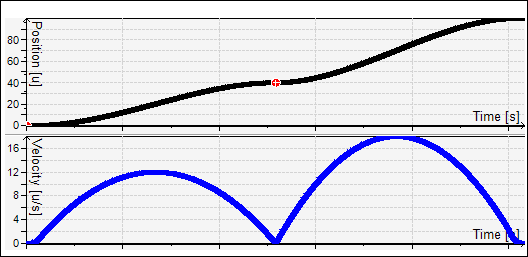
En el caso lineal, verá un salto en la velocidad, porque 40 unidades del eje adicional viajan en 50 unidades de trayectoria en la primera parte, y 60 unidades del eje adicional viajan en 50 unidades de trayectoria en la segunda parte. Debido a que la velocidad de la trayectoria define (XYZ) solo después del espacio cartesiano de la trayectoria, una velocidad constante en X provoca un salto de velocidad en P:
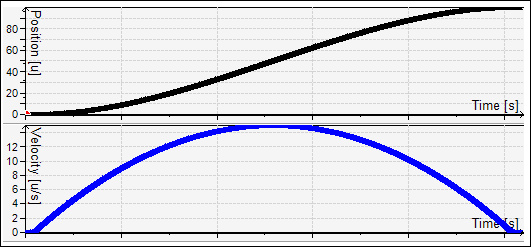
El eje spline muestra el siguiente perfil:
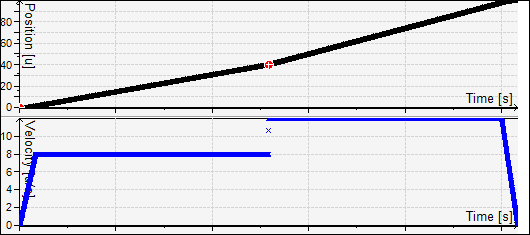
La pendiente de los ejes A, B y C en la posición final se puede definir mediante la palabra U, V y W. La unidad de la pendiente es la unidad de trayectoria del eje adicional por unidad de trayectoria en el espacio.
Código G
N10 G0 X0 A0 F10 E30 E-30 N20 G1 X100 A100 U1.5 N30 G1 X200 A200 U0
La pendiente programada por el usuario (U=2) del eje A se aplica porque este programa contiene una transición continua entre N20 y N30. Por lo tanto, para X=100, la posición del eje A aumenta dos veces más rápido que la longitud de la trayectoria