Redundancia
Sistema de control redundante
Puede aumentar la fiabilidad de su sistema de control protegiendo su PLC con un PLC redundante. El PLC redundante puede hacerse cargo de la ejecución de la aplicación en tiempo de ejecución. Esto puede evitar fallos en el sistema, por ejemplo
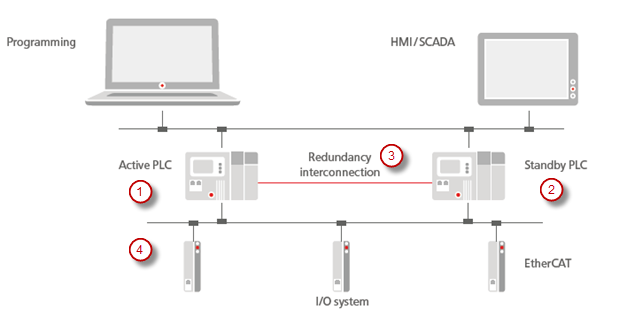
La ilustración muestra la estructura de un sistema de control redundante. La aplicación se ejecuta simultáneamente en dos PLC: un PLC activo (1) y el segundo PLC en modo de espera (2). El PLC en modo de espera lee las entradas del sistema de bus de campo conectado (EtherCAT en la ilustración) y se sincroniza con el PLC activo a través del enlace de redundancia (3). Esto permite que el PLC en espera se active inmediatamente en caso de avería y asuma el control de los buses de campo (4) sin
La interconexión de redundancia (3) se implementa con TCP y UDP, pero se puede reemplazar por un componente específico del proveedor.
Además, puede usar visualizaciones con el sistema de control redundante cuando se ejecutarán como CODESYS WebVisu en un navegador. Los clientes de visualización seguirán funcionando casi sin problemas en caso de un cambio.
Información básica sobre la funcionalidad
El programador de aplicaciones descarga la aplicación en el primer PLC y crea una aplicación de arranque.
El segundo PLC se sincroniza cuando se arranca y recibe la aplicación de arranque.
La aplicación de arranque se carga e inicializa y, a continuación, está lista para ejecutar el primer ciclo de tareas. Todos los datos de las áreas de memoria registradas (todos los datos IEC) se transfieren al segundo PLC. Esto significa que la redundancia es efectiva y que la tarea de la aplicación se ejecuta de forma sincrónica en ambos PLC. La sincronización de la ejecución de la tarea se implementa mediante mensajes que se envían a través de la interconexión de redundancia. Los mensajes se envían antes y después de ejecutar la tarea de IEC
No hay ningún PLC activo preferido. El modo de funcionamiento viene determinado por la secuencia de arranque. El primer PLC que arranca envía el mensaje correspondiente a través de la interconexión de redundancia. Si no recibe respuesta, carga la aplicación de arranque y se ejecuta en modo autónomo
Si el PLC en espera no recibe un mensaje del PLC activo dentro del tiempo configurado, el PLC en espera asume que el PLC activo ya no funciona. Como resultado, el PLC en espera pasa al modo autónomo y ahora controla las E/S del bus de campo. El PLC activo también cambia al modo autónomo si no ha recibido ningún mensaje del PLC en espera dentro del tiempo configurado
Si se sustituye y se reinicia el primer PLC, se sincroniza con el otro PLC que se encuentra actualmente en modo autónomo, tal como se ha descrito anteriormente, y por lo tanto pasa al modo de espera.
Un PLC en espera se puede cambiar al modo de simulación. De este modo, la redundancia no se activa, pero el bus de campo permanece desactivado como en modo de espera. El PLC activo pasa al modo autónomo. El modo de simulación se puede finalizar resincronizando o reiniciando el PLC. A continuación, el PLC vuelve al modo de espera, a menos que se produzcan errores
Si se producen errores durante la actualización de la aplicación de arranque o de las áreas de memoria registradas, o durante el ciclo de redundancia, el PLC pasa al modo de error. A continuación, debe resincronizarse
Aviso
 "Redundancy using the example of two Raspberry Pis with CODESYS Control for Raspberry Pi SL"
"Redundancy using the example of two Raspberry Pis with CODESYS Control for Raspberry Pi SL"
El vídeo pretende ofrecer una visión general de esta función. La gama de funciones de CODESYS Redundancy como se ha visto, puede diferir de la gama actual de funciones.
