Kin_5Axes (FB)¶
FUNCTION_BLOCK Kin_5Axes EXTENDS Kin_Coupled
Transformation FB for 5-axes-gantries. This is a possible way how a coupled kinematic can be realized based on existing kinematics.
The 5-axes transformation enables the controlling of 3 linear axes (X, Y, Z) carrying a tool head, which consists of two axes carrying the tool. The tool head can be turned around the Z-axis and can be tilt according to the scheme aside.
Machine coordinate system (MCS) |
|
|---|---|
Origin |
The location of the TCP when the first three axes are 0. |
X |
Corresponds directly to the direction of the first axis (a0), i.e. a positive velocity on the first axis leads to a movement in positive x direction in the MCS. |
Y |
Corresponds directly to the direction of the second axis (a1), i.e. a positive velocity on the second axis leads to a movement in positive y direction in the MCS. |
Z |
Corresponds directly to the position of the third axis (a2), i.e. a positive velocity on the third axis leads to a movement in positive z direction in the MCS. |
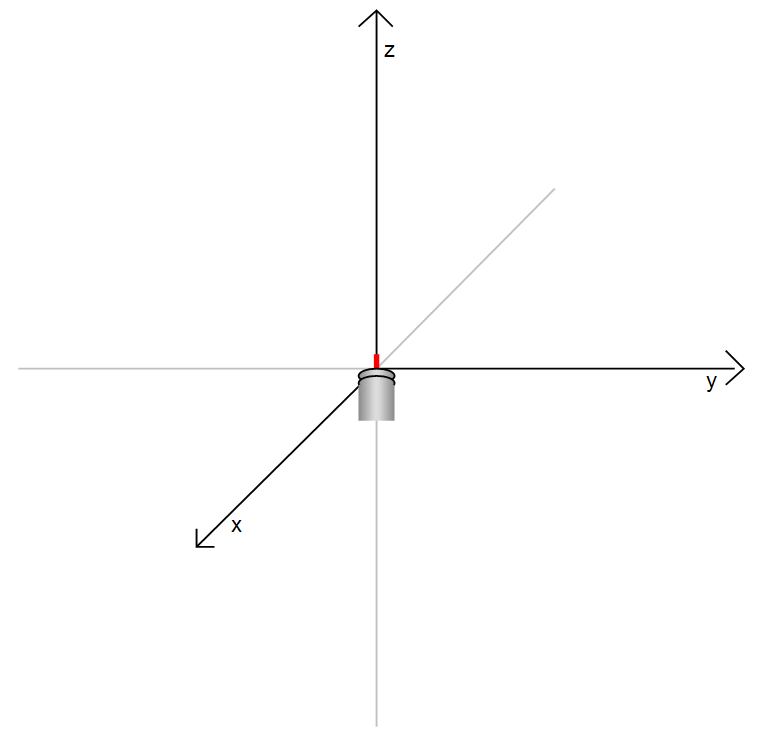
The location of the tool coordinate system (TCS) relative to the MCS in zero position:
Tool coordinate system (TCS) |
|
|---|---|
Origin |
Relative to MCS: dX = 0 dY = 0 dZ = dToolLength |
X |
Along the X-Axis of the MCS in positive direction |
Y |
Along the Y-Axis of the MCS in positive direction |
Z |
Along the Z-Axis of the MCS in positive direction |
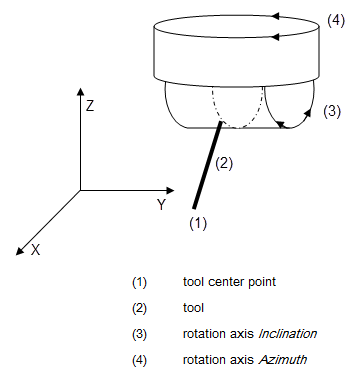
In zero position, the tool center point (TCP) is located on (0, 0, dToolLength), the tool extends in the direction of the Z axis. Moving the Inclination axis in positive direction moves the tool in the direction of the positive X axis (if dToolLength <> 0).
The single axes values have the following interpretation:
a0 |
position of the x axis of the machine (X) |
a1 |
position of the y axis of the machine (Y) |
a2 |
position of the z axis of the machine (Z) |
a3 |
angle [deg] of the yaw axis (azimuth) (A) |
a4 |
angle [deg] of the roll axis (inclination) (B) |
- Attributes:
sm_kin_libdoc- InOut:
Scope
Name
Type
Comment
Inherited from
Input
itfPosKinitfOriKindToolLengthLREALLength of tool measured from the TCP to the point of intersection between the two axes (yaw/roll).
Properties:
NumAxes, inherited from Kin_Coupled
Methods:
ActivateAutomaticRotaryPeriods, inherited from Kin_Coupled
AxesToCartesian, inherited from Kin_Coupled
AxisSettings, inherited from Kin_Coupled
CPConnectible, inherited from Kin_Coupled
CartesianToAxes, inherited from Kin_Coupled
GetAxisMapping, inherited from Kin_Coupled
GetAxisMapping2, inherited from Kin_Coupled
GetAxisProperties, inherited from Kin_Coupled
GetConfigurationDataSize, inherited from Kin_Coupled
GetDefaultConfigurationData, inherited from Kin_Coupled
GetFlangeOrientationImageTotal, inherited from Kin_Coupled
GetFlangeOrientationImageWithOri, inherited from Kin_Coupled
GetPeriods, inherited from Kin_Coupled
GetPosAndToolKinematics, inherited from Kin_Coupled
IsConfigSingular, inherited from Kin_Coupled
IsInitialized, inherited from Kin_Coupled
IsSingularity, inherited from Kin_Coupled
JoinAxes, inherited from Kin_Coupled
JoinConfig, inherited from Kin_Coupled
SplitAxes, inherited from Kin_Coupled
SplitConfig, inherited from Kin_Coupled
Structure: