Overview of Defined Segment Types
CODESYS SoftMotion provides various segment types for cams.
Depending on the compile format, only some of the segment types are supported:
XYVA: Line and Poly5 only.
Segments: All segment types are supported.
Segment Type | Parameters | Curve |
|---|---|---|
Poly7 | . Boundary conditions
| 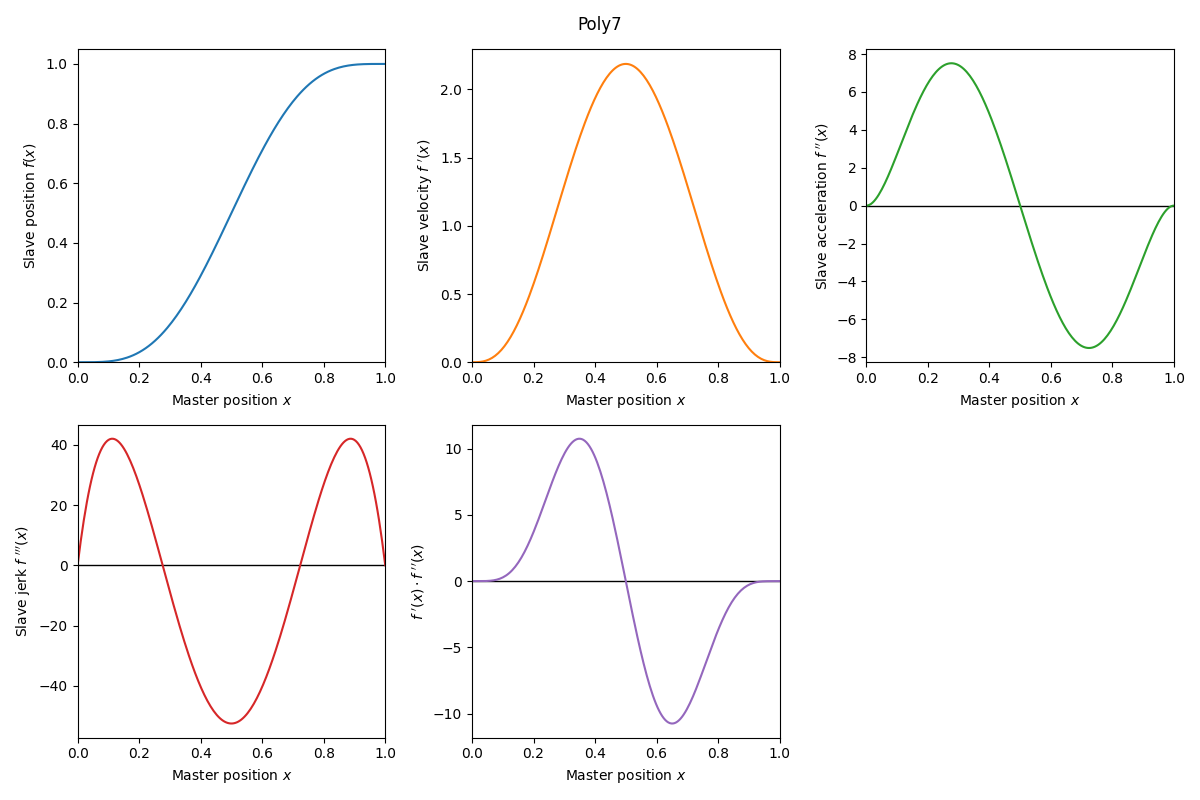 |
Poly5 | . Boundary conditions
| 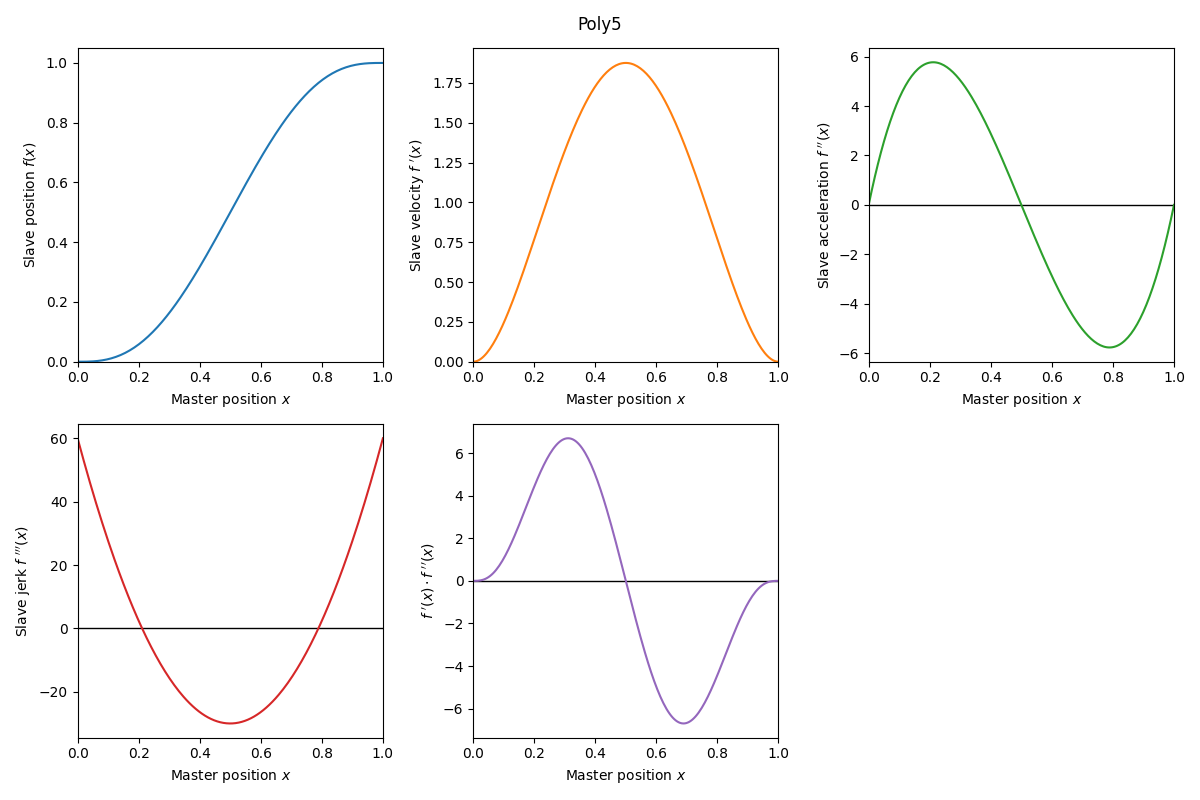 |
ModifiedSine | . Boundary conditions
. Segment parameters
| 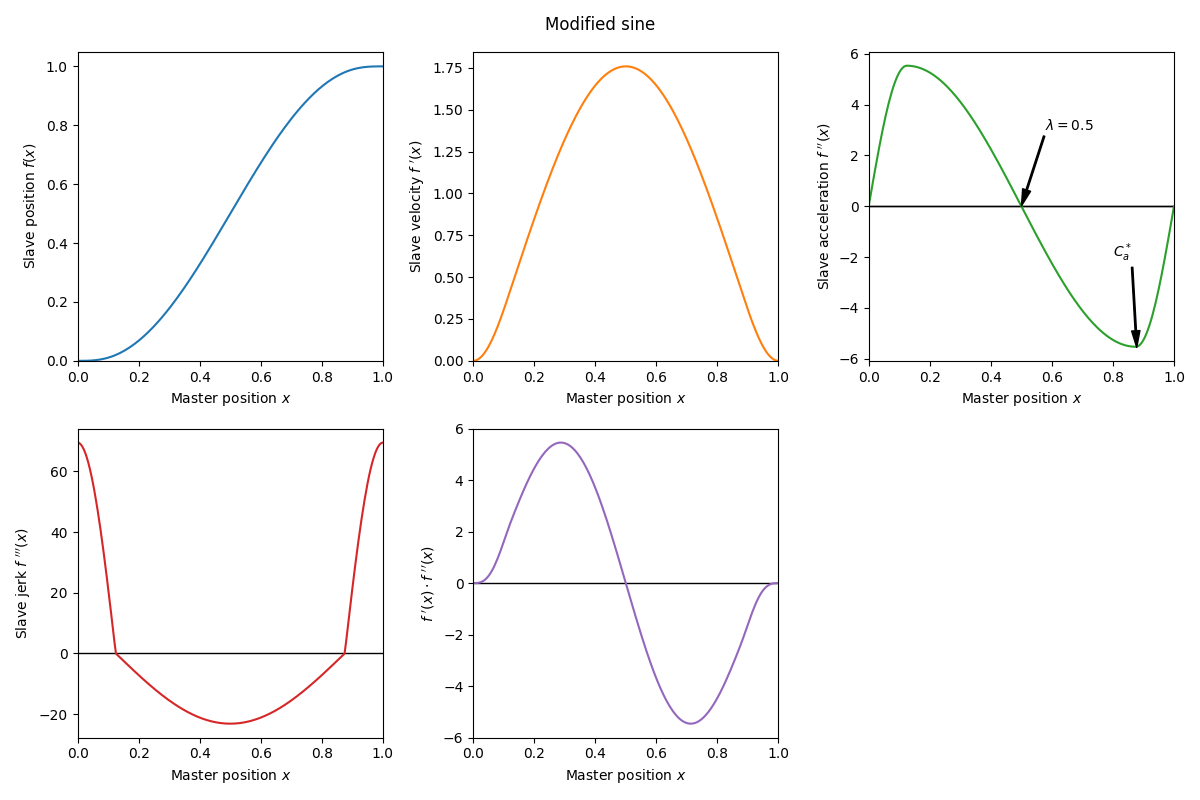 |
Line | . Boundary conditions
| 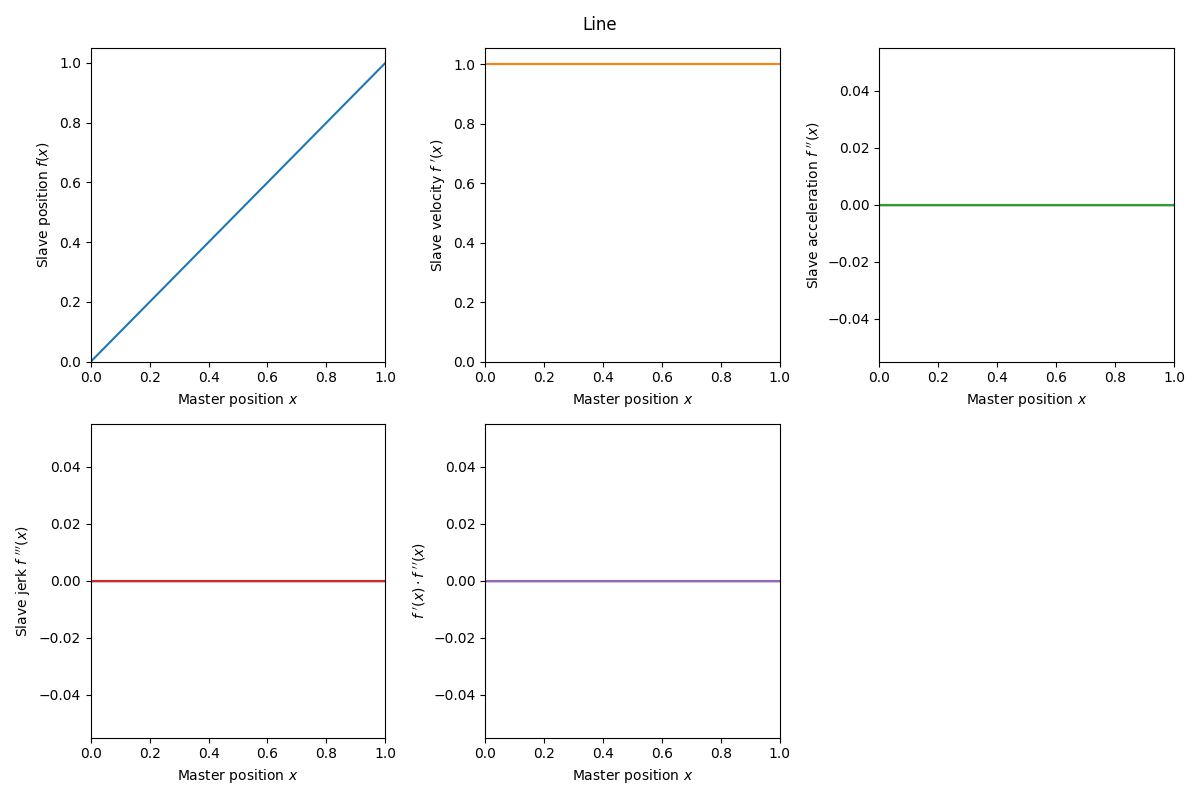 |
InclinedSine | . Boundary conditions
| 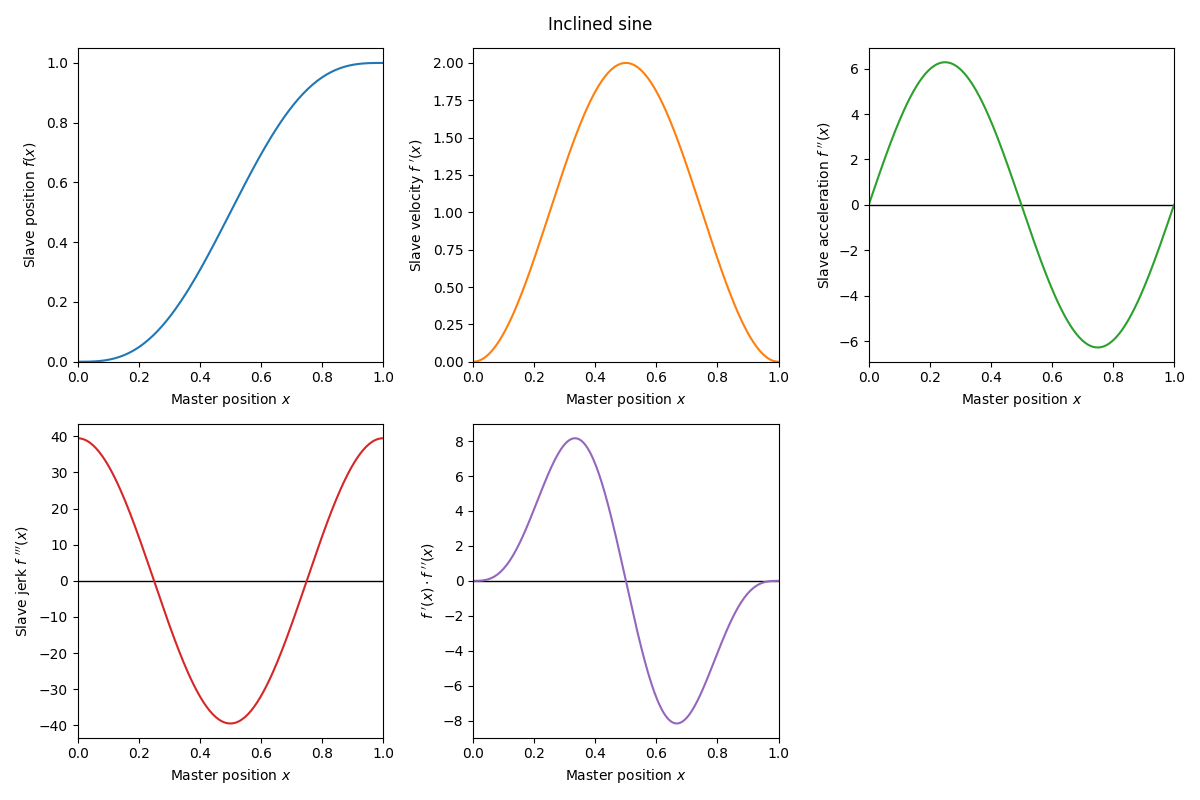 |
The selection of the segment type depends on the application because each type has special dynamic properties. There are various applicable segment types depending on the movement task (for example, dwell – constant velocity).
The following table provides an overview:
Dwell (v=0, a=0) | Constant velocity (v≠0, a=0) | Reversal (v=0, a≠0) | Movement (v≠0, a≠0) | |
|---|---|---|---|---|
Dwell (v=0, a=0) |
|
|
|
|
Constant velocity (v≠0, a=0) |
|
|
|
|
Reversal (v=0, a≠0) |
|
|
|
|
Movement (v≠0, a≠0) |
|
|
|
|