General
The CANopen Manager is the CAN bus master and is inserted in the CAN bus configuration below the CAN bus node.
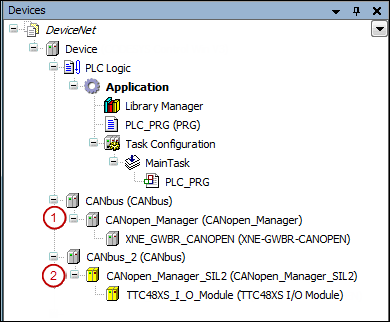
CODESYS provides the following CANopen Masters:
CANopen Manager (1)
CANopen Manager SIL2 (2)
CANopen Manager SoftMotion: Can be inserted below a SoftMotion controller; contains adapted presets for operation of motion via CANbus.
In CODESYS, a CANopen Remote Device is a slave device that you insert below a CANopen Manager in the device tree of a project. A distinction is made between modular and non-modular slaves:
Modular slaves: You can insert CANopen modules (submodules) below a modular slave. These modules provide a I/O Mapping tab to "map" their inputs and outputs. Modular slaves can also have fixed I/Os. Then these devices also provide the I/O Mapping tab. Modular devices provide the Configure PDO mapping automatically option, which we recommend for standard applications. You find this option in the CANopen Remote Device dialog, on the General tab.
Non-modular slaves: You cannot insert additional modules below a non-modular device. The inputs and outputs of these devices are "mapped" in the I/O Mapping dialog. Automatic mapping is not possible here.