Allgemein
Der CANopen Manager ist der CAN-Bus-Master und wird in der CAN-Bus-Konfiguration unterhalb des CAN-Bus-Knotens eingefügt.
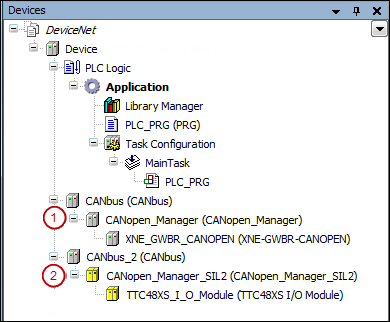
CODESYS stellt Ihnen die folgenden CANopen-Master zur Verfügung:
CANopen Manager (1)
CANopen Manager SIL2 (2)
CANopen Manager SoftMotion: Kann unter einer SoftMotion-Steuerung eingefügt werden und enthält angepasste Voreinstellungen für einen Betrieb von Motion über CANbus.
In CODESYS ist ein CANopen Remote Device ein Slave-Gerät, das Sie im Gerätebaum eines Projekts unter einem CANopen Manager (Master) einfügen. Dabei wird zwischen modularen und nicht-modularen Slaves unterschieden:
Modulare Slaves: Unterhalb eines modularen Slaves können Sie CANopen Module (Submodule) einhängen. Diese Module bieten eine Registerkarte E/A-Abbild für das „Mapping“ ihrer Ein- und Ausgänge. Modulare Slaves können auch selbst feste E/As haben. Dann bieten auch diese Geräte die Registerkarte E/A-Abbild. Modulare Geräte bieten die Option PDO-Mapping automatisch konfigurieren, die für Standardapplikationen empfohlen wird. Sie finden diese Option im Dialog CANopen Remote Device in der Registerkarte Allgemein.
Nicht-modulare Slaves: Unterhalb eines nicht-modularen Geräts können keine weiteren Module eingehängt werden. Das „Mapping“ der Eingänge und Ausgänge dieser Geräte erfolgt im Dialog E/A-Abbild. Ein automatisches Mapping ist hier nicht möglich.